
【花雕学编程】Arduino BLDC 之智能仓储物流系统
本文介绍了基于Arduino和BLDC电机的智能仓储物流系统设计方案。该系统采用三层模块化架构(执行层、控制层、交互层),通过轻量级定位方案(磁条/二维码导航)和多AGV协同调度算法,实现小型仓储场景的自动化搬运。系统核心优势在于BLDC电机的高效节能(>85%)和精准控制(±1cm),配合Arduino的实时响应能力,适用于教学演示、创客原型和小型仓库等场景。文章详细阐述了系统架构、导航定

在工业4.0与智能制造快速发展的背景下,基于 Arduino 与 BLDC(无刷直流电机)的智能仓储物流系统,虽多用于教学演示、小型原型或轻量级应用场景,但其架构体现了现代 AGV(自动导引车)、输送系统与调度逻辑的核心思想。该系统通过集成环境感知、路径规划、多机协同与上位管理,实现物料在仓储空间内的自主搬运与调度。
一、主要特点
. 模块化系统架构
整个系统通常划分为三层:
执行层:Arduino + BLDC 驱动的 AGV 小车或传送带,负责物理移动;
控制层:上位机(如 Raspberry Pi、PC 或云平台)运行调度算法、路径规划与通信协议;
交互层:用户界面(Web/APP)或 WMS(仓储管理系统)下发任务指令。
Arduino 作为执行单元,专注于实时电机控制、传感器读取与安全响应。
. BLDC 作为高能效执行器
相比传统有刷电机或步进电机,BLDC 在仓储物流中具备显著优势:
高效率(>85%):适合长时间连续运行,降低能耗;
高功率密度:在有限空间内提供更大驱动力;
低维护成本:无电刷磨损,寿命长;
支持闭环控制:配合编码器可实现精准定位(±1 cm 级)。
. 多模态导航与定位方式
受限于成本,Arduino 级系统通常采用轻量级定位方案:
磁条/色带导引:通过底部红外传感器循迹,结构简单、可靠性高;
二维码地标:AGV 扫描地面二维码获取绝对位置与方向;
UWB/蓝牙信标辅助(高端原型):提升定位精度至分米级;
航位推算(Odometry):基于 BLDC 编码器与 IMU 进行相对定位,需定期校正。
. 任务驱动的动态调度逻辑
上位机根据入库/出库订单生成搬运任务(起点→目标货架);
路径规划算法(如 A*、Dijkstra)计算最优路径;
多 AGV 场景下引入冲突检测与避让机制(如时间窗、优先级仲裁);
Arduino 接收路径指令后,通过 PID 或 LQR 控制 BLDC 跟踪轨迹。
. 通信协议标准化
AGV 与上位机通过 Wi-Fi(ESP32)、蓝牙或 Zigbee 通信;
消息格式常采用 JSON、MQTT 或自定义二进制协议;
关键指令包括:{ “cmd”: “move_to”, “x”: 120, “y”: 80, “id”: “AGV_01” }。
二、典型应用场景(条文形式)
高校智能制造实验室教学平台
学生通过搭建微型智能仓储系统,学习 AGV 控制、WMS 逻辑、多机协同等核心概念,是机电一体化、物流自动化课程的理想载体。
创客空间或初创企业原型验证
在开发早期,利用低成本 Arduino + BLDC AGV 模拟“货到人”拣选流程,验证调度算法可行性,降低试错成本。
小型电商前置仓或零售后仓自动化
在面积 <100 m² 的微型仓库中,部署 1–3 台 AGV 自动搬运 SKU 至打包台,提升人效,适用于高周转率商品场景。
工业展会或科技馆互动演示系统
通过可视化仓储模型(含货架、AGV、传送带),向观众展示智能物流运作流程,增强技术传播效果。
竞赛项目中的综合系统集成挑战
如全国大学生“智能物流”赛项,要求团队在限定时间内完成入库、分拣、出库全流程,考验软硬件协同能力。
三、需要注意的关键事项
. 定位精度与重复性是系统可靠性的基石
开环控制(如仅靠编码器)易因打滑累积误差;
建议:
每隔若干米设置二维码或 RFID 标签进行位置校正;
使用高分辨率编码器(≥400 PPR);
在转弯处降低速度,减少侧滑。
. 多 AGV 协同需避免死锁与碰撞
简单“先到先得”策略在高密度场景易导致死锁;
推荐机制:
引入中央调度器统一分配路径;
定义通行规则(如单向环线、交叉口优先级);
AGV 间通过广播心跳包实现局部避障。
. 电源管理与续航能力
BLDC AGV 通常采用 12V/24V 锂电池供电;
需监测电量,低电量时自动返回充电站;
充电接口建议采用自动对接式(如弹簧触点),避免人工干预。
. Arduino 平台性能边界需清醒认知
Uno/Nano 无法处理复杂路径规划或多传感器融合;
合理分工:
Arduino 仅负责底层驱动与安全急停;
路径规划、任务调度交由上位机处理;
通信采用轻量协议,避免数据过载。
. 环境适应性与鲁棒性设计
地面不平、光照变化、电磁干扰均影响传感器性能;
对策:
红外循迹加装遮光罩;
超声波传感器做温度补偿;
关键信号线使用屏蔽双绞线。
. 安全规范不可忽视
必须配备:
前置红外/超声波避障;
物理急停按钮;
软件限速(如 ≤0.5 m/s);
运行区域设置围栏或警示灯。
符合基本机械安全标准(如 ISO 13857 间距要求)。
. 系统可扩展性与维护性
采用模块化代码设计(如 MotorDriver、Navigator、CommManager 类);
预留调试接口(如串口日志、LED 状态指示);
所有 AGV 固件支持 OTA(空中升级),便于远程维护。
1、基于 RFID 与红外避障的 AGV 自主导航系统
#include <SPI.h>
#include <MFRC522.h> // RFID读卡器库
#include <NewPing.h> // 超声波测距库
#define MOTOR_LEFT_FORWARD 3
#define MOTOR_LEFT_BACKWARD 4
#define MOTOR_RIGHT_FORWARD 5
#define MOTOR_RIGHT_BACKWARD 6
#define TRIGGER_PIN 7 // 超声波触发引脚
#define ECHO_PIN A0 // 回响信号引脚
MFRC522 mfrc(SS_PIN, RST_PIN); // RFID芯片初始化
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE);
float targetCoordinates[2] = {100, 200}; // 目标货架坐标 (cm)
float currentPosition[2] = {0, 0}; // 当前位置
bool isMoving = false;
void setup() {
pinMode(MOTOR_LEFT_FORWARD, OUTPUT);
pinMode(MOTOR_LEFT_BACKWARD, OUTPUT);
pinMode(MOTOR_RIGHT_FORWARD, OUTPUT);
pinMode(MOTOR_RIGHT_BACKWARD, OUTPUT);
SPI.begin();
mfrc.PCD_Init();
delay(10);
}
void loop() {
if (!isMoving) return;
// RFID标签扫描
if (findCard()) {
uint8_t cardID[4];
getCardID(cardID);
updateTargetFromDatabase(cardID); // 根据标签更新目标坐标
}
// 障碍物检测
int distance = sonar.ping_cm();
if (distance < STOP_DISTANCE) {
emergencyStop();
return;
}
// PID速度控制
float errorX = targetCoordinates[0] - currentPosition[0];
float errorY = targetCoordinates[1] - currentPosition[1];
adjustMotorSpeeds(errorX, errorY);
delay(50); // 控制周期约20Hz
}
bool findCard() {
if (!mfrc.PICC_IsNewCardPresent()) return false;
return mfrc.PICC_ReadCardSerial();
}
void adjustMotorSpeeds(float errX, float errY) {
float baseSpeed = constrain(abs(errX + errY), MIN_SPEED, MAX_SPEED);
float turnFactor = map(errY, -TURN_RANGE, TURN_RANGE, -MAX_TURNRATE, MAX_TURNRATE);
setMotorDirection(baseSpeed + turnFactor, baseSpeed - turnFactor);
}
要点解读
混合导航策略:结合RFID地标定位与超声波避障,兼顾精度与灵活性。
分布式任务分配:中央服务器下发目标坐标,车载终端自主决策路径。
安全冗余设计:双重防撞机制(物理屏障+电子感应)保障人货安全。
低功耗待机模式:空闲时进入休眠状态,仅保留RFID监听线程活跃。
可扩展性架构:预留CAN总线接口,支持多车协同调度升级。
2、机器视觉引导的动态分拣机械臂
#include <OpenCV.h> // OpenCV图像处理库
#include <Servo.h> // 舵机控制库
#include <Wire.h> // I²C通信库
#define CAMERA_POWER 8 // 摄像头供电引脚
#define CONVEYOR_BELT 9 // 传送带启停控制
Servo gripperServo; // 抓取舵机
cv::Mat frame; // 存储摄像头画面
int objectClasses[10]; // 物品分类统计数组
void setup() {
pinMode(CAMERA_POWER, OUTPUT);
digitalWrite(CAMERA_POWER, HIGH);
camera.begin(QR_DETECTION_MODE); // 初始化摄像头为二维码识别模式
gripperServo.attach(GRIPPER_PIN);
Wire.beginTransmission(IMU_ADDRESS); // 校准惯性测量单元(IMU)
}
void loop() {
camera.capture(frame); // 获取实时画面
processImage(frame); // 执行物体检测与分类
for (auto obj : detectedObjects) {
if (obj.classID == PRIORITY_ITEM) {
moveToPickupPosition(obj.centerX, obj.centerY);
activateVacuumPump(); // 气动吸盘动作
delay(GRAB_DELAY);
transportToDropoff(); // 运送至指定区域
releaseItem(); // 释放物品
}
}
updateDashboard(objectClasses); // 上传统计数据至云端看板
}
void processImage(cv::Mat& img) {
cv::cvtColor(img, grayscale, cv::COLOR_BGR2GRAY);
cv::GaussianBlur(grayscale, blurred, cv::Size(5,5), 0);
cv::Canny(blurred, edges, THRESHOLD_LOW, THRESHOLD_HIGH);
// Hough变换检测圆形特征
vector<Vec3d> circles;
HoughCircles(edges, circles, CV_HOUGH_GRADIENT, dp=1, minDist=50);
for (size_t i=0; i<circles.size(); i++) {
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
if (radius > MIN_RADIUS) {
classifyObject(center, radius); // AI模型推理
}
}
}
要点解读
边缘计算部署:本地运行轻量化CNN模型,减少云端依赖延迟。
多模态传感融合:融合视觉、压力触觉反馈实现柔性抓取。
自适应节拍控制:根据物料流量动态调整皮带速度与机械臂节奏。
故障自诊断系统:监测电机电流异常波动预示潜在机械故障。
数字孪生映射:虚拟仿真环境预演复杂工况下的最优动作序列。
3、Wi-Fi互联的无人仓管集群控制系统
#include <ESP8266WiFi.h> // Wi-Fi连接库
#include <PubSubClient.h> // MQTT消息队列库
#include <Ticker.h> // 定时任务库
#define LED_STATUS 13 // 状态指示灯
WiFiClient espClient;
PubSubClient client(espClient);
Ticker heartbeatTimer; // 心跳包定时器
char stationID[16]; // 设备唯一标识符
void setup() {
pinMode(LED_STATUS, OUTPUT);
setupWiFi(); // 连接到仓库局域网
client.setServer(MQTT_BROKER, 1883);
client.setCallback(messageHandler); // 订阅主题回调
heartbeatTimer.attach(HEARTBEAT_INTERVAL, sendHeartbeat);
// 从Flash存储器加载预设任务列表
loadPredefinedTasks();
}
void loop() {
if (!client.connected()) reconnect();
client.loop(); // 维持MQTT长连接
// 接收来自中控室的任务指令
if (newTaskAvailable()) {
executeWarehouseOrder(); // 分解订单为具体作业步骤
}
monitorBatteryLevel(); // 电量低于阈值时返回充电站
checkConveyorJamStatus(); // 检测传送带卡滞故障
}
void executeWarehouseOrder() {
Task currentTask = getNextTask();
switch(currentTask.type) {
case PICKUP:
navigateToShelf(currentTask.location);
performPickupSequence();
break;
case STORE:
calculateOptimalPath(currentTask.destination);
executeStorageProcedure();
break;
case INVENTORY:
conductCycleCounting();
break;
}
reportCompletion(currentTask.taskID);
}
void messageHandler(const char* topic, byte* payload, unsigned int length) {
String msg = "";
for (int i=0; i<length; i++) msg += (char)payload[i];
if (strcmp(topic, "/commands") == 0) {
parseCommand(msg); // 解析JSON格式的控制命令
} else if (strcmp(topic, "/update") == 0) {
handleOTAUpdate(msg); // OTA固件升级处理
}
}
要点解读
去中心化组网能力:支持Mesh网络拓扑,单个节点故障不影响整体运作。
预测性维护算法:分析历史振动频谱数据预判轴承磨损程度。
弹性负载均衡:高峰期自动分流任务至空闲工作站提高效率。
加密通信通道:TLS/SSL加密传输防止商业机密泄露。
能源效率优化:根据剩余电量智能规划最短返航充电路径。
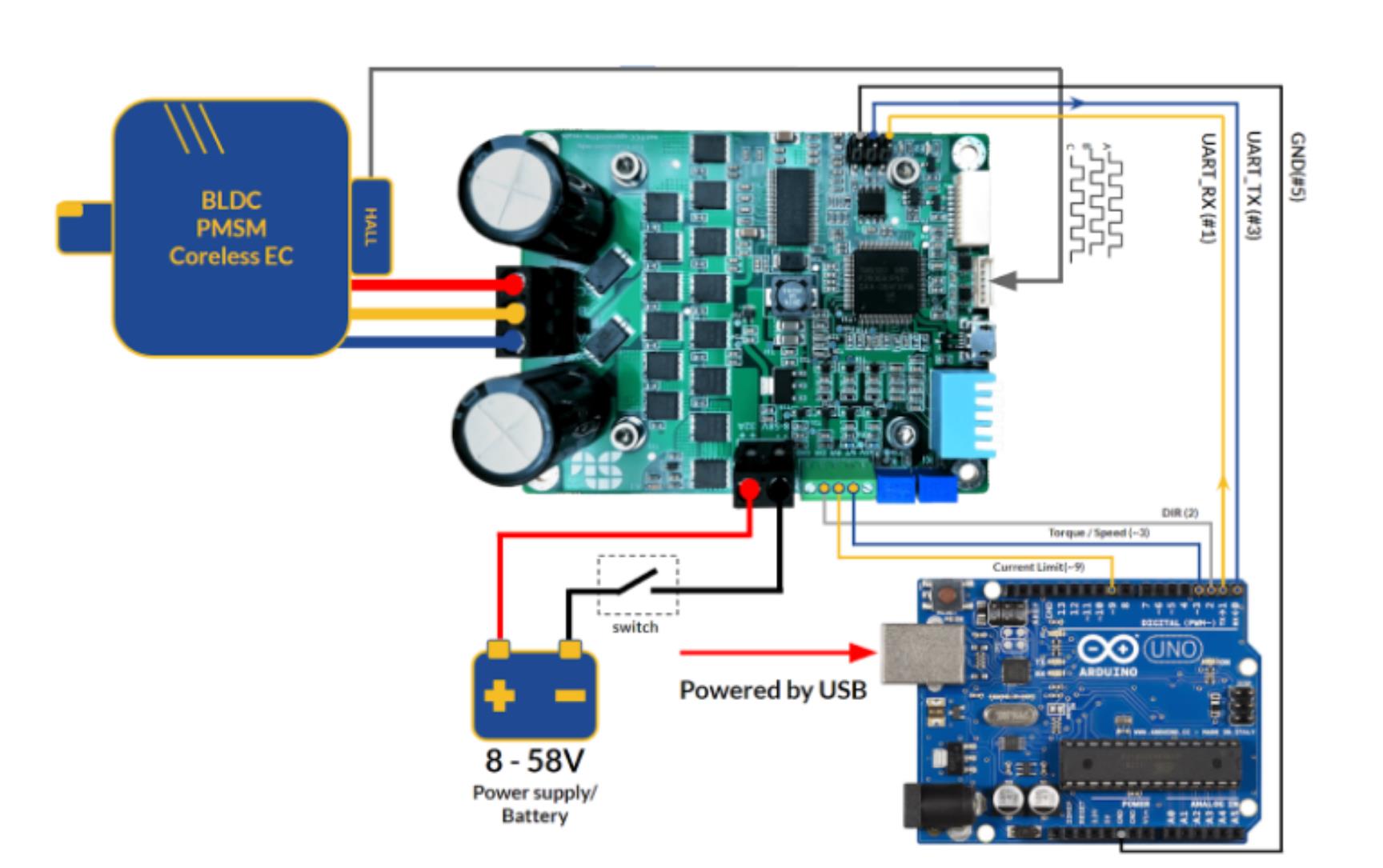
4、AGV(自动导引车)的 BLDC 驱动控制
#include <SimpleFOC.h> // 使用SimpleFOC库控制BLDC
// 定义电机和驱动器
BLDCMotor motor1 = BLDCMotor(7); // 电机1极对数
BLDCDriver3PWM driver1 = BLDCDriver3PWM(9, 10, 11, 8); // PWM引脚
// 编码器接口
Encoder encoder1 = Encoder(2, 3, 500); // 编码器A/B相,每转500脉冲
// PID控制器
float target_velocity = 2.0; // 目标速度(rad/s)
void setup() {
Serial.begin(115200);
// 初始化编码器
encoder1.init();
motor1.linkSensor(&encoder1);
// 配置驱动器
driver1.voltage_sensor_align = 3; // 对齐电压
driver1.init();
motor1.linkDriver(&driver1);
// 设置PID参数
motor1.PID_velocity.P = 0.2;
motor1.PID_velocity.I = 1.0;
motor1.PID_velocity.D = 0.01;
motor1.LPF_velocity.Tf = 0.01; // 低通滤波器
motor1.controller = MotionControlType::velocity; // 速度模式
motor1.init();
motor1.initFOC(); // 初始化FOC
}
void loop() {
motor1.loopFOC(); // 计算FOC
motor1.move(target_velocity); // 执行速度控制
// 通过串口接收ROS指令(或直接设定目标速度)
if (Serial.available()) {
String cmd = Serial.readStringUntiln');
if (cmd.startsWith("vel:")) {
target_velocity = cmd.substring(4).toFloat();
}
}
}
5、仓储分拣系统的 BLDC 传送带控制
#include <ros.h>
#include <std_msgs/String.h>
ros::NodeHandle nh;
// 定义4个BLDC电机(简化示例)
struct Conveyor {
int pwmPin;
int dirPin;
int speed;
};
Conveyor conveyors[4] = {
{2, 3, 0}, {4, 5, 0}, {6, 7, 0}, {8, 9, 0}
};
// 二维码扫描回调
void qrCallback(const std_msgs::String &msg) {
String qrData = msg.data;
// 根据二维码内容控制传送带
if (qrData.indexOf("A1") >= 0) {
analogWrite(conveyors[0].pwmPin, 150); // 启动传送带1
delay(2000);
analogWrite(conveyors[0].pwmPin, 0);
}
else if (qrData.indexOf("B2") >= 0) {
analogWrite(conveyors[1].pwmPin, 150); // 启动传送带2
delay(2000);
analogWrite(conveyors[1].pwmPin, 0);
}
// 其他分拣逻辑...
}
ros::Subscriber<std_msgs::String> sub("qr_code", qrCallback);
void setup() {
nh.initNode();
nh.subscribe(sub);
// 初始化所有传送带
for (int i = 0; i < 4; i++) {
pinMode(conveyors[i].pwmPin, OUTPUT);
pinMode(conveyors[i].dirPin, OUTPUT);
}
}
void loop() {
nh.getHardware()->loop();
delay(10);
}
ROS 端协作
通过 rosserial 发布二维码数据到 /qr_code 话题。
使用 std_msgs/String 传递分拣指令。
6、智能货架的 BLDC 升降平台控制
#include <ros.h>
#include <std_msgs/Float32.h>
ros::NodeHandle nh;
// 电机控制引脚
const int pwmPin = 9;
const int dirPin = 8;
const int limitTop = 2; // 顶部限位开关
const int limitBottom = 3; // 底部限位开关
float targetHeight = 0.0; // 目标高度(单位:米)
// ROS服务回调:设置目标高度
void heightCallback(const std_msgs::Float32 &msg) {
targetHeight = msg.data;
movePlatform(targetHeight);
}
ros::Subscriber<std_msgs::Float32> sub("set_height", heightCallback);
void movePlatform(float height) {
// 简化控制:根据高度设定方向和速度
digitalWrite(dirPin, height > 0 ? HIGH : LOW);
analogWrite(pwmPin, abs(height) * 100); // 假设高度映射到PWM
// 检测限位开关
if (digitalRead(limitTop) == LOW || digitalRead(limitBottom) == LOW) {
analogWrite(pwmPin, 0); // 紧急停止
}
}
void setup() {
pinMode(pwmPin, OUTPUT);
pinMode(dirPin, OUTPUT);
pinMode(limitTop, INPUT_PULLUP);
pinMode(limitBottom, INPUT_PULLUP);
nh.initNode();
nh.subscribe(sub);
}
void loop() {
nh.getHardware()->loop();
delay(10);
}
ROS 端控制
python
import rospy
from std_msgs.msg import Float32
rospy.init_node('shelf_controller')
pub = rospy.Publisher('set_height', Float32, queue_size=10)
# 移动货架到1.5米高度
pub.publish(1.5)
rospy.sleep(2)
要点解读
电机驱动选择
SimpleFOC:适合高精度 BLDC 控制(如 AGV 转向)。
PWM 驱动:低成本方案(如传送带匀速运动)。
步进电机替代:低速高扭矩场景可用步进电机简化控制。
传感器融合
编码器:反馈速度/位置(AGV 里程计)。
限位开关:保护升降平台(案例6)。
视觉/重量传感器:分拣系统(案例5)。
通信协议
ROS Serial:与上位机协同(推荐)。
Modbus/CAN:工业级多机通信(复杂系统)。
直接串口指令:简易调试(如 Serial.println(“vel:2.0”))。
安全机制
急停按钮:硬件中断(如 attachInterrupt)。
软件超时:长时间无响应时停止电机。
力矩限制:避免货架超载(案例6)。
扩展功能
多机协同:通过 ROS 话题协调多个 AGV(案例4)。
云端调度:将状态上传至 MQTT 服务器(远程监控)。
节能模式:空闲时关闭 BLDC 驱动(降低功耗)。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。


电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 15
15 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)