
仓储物流摆渡车:博途1200程序开发之旅
仓储物流摆渡车程序,博途1200程序,与上位机TCP通讯,赠送SCL学习资料。自制编码器定位,多位置处理,模拟量调速,采用SCL与梯形图混编,结构化编程框架,在仓储物流的自动化进程中,摆渡车扮演着重要角色。今天就来聊聊基于博途1200的仓储物流摆渡车程序开发那些事儿,还会免费赠送SCL学习资料哦,别错过!
仓储物流摆渡车程序,博途1200程序, 与上位机TCP通讯,赠送SCL学习资料。 自制编码器定位,多位置处理,模拟量调速, 采用SCL与梯形图混编, 结构化编程框架,
在仓储物流的自动化进程中,摆渡车扮演着重要角色。今天就来聊聊基于博途1200的仓储物流摆渡车程序开发那些事儿,还会免费赠送SCL学习资料哦,别错过!
一、通讯架构:与上位机TCP通讯
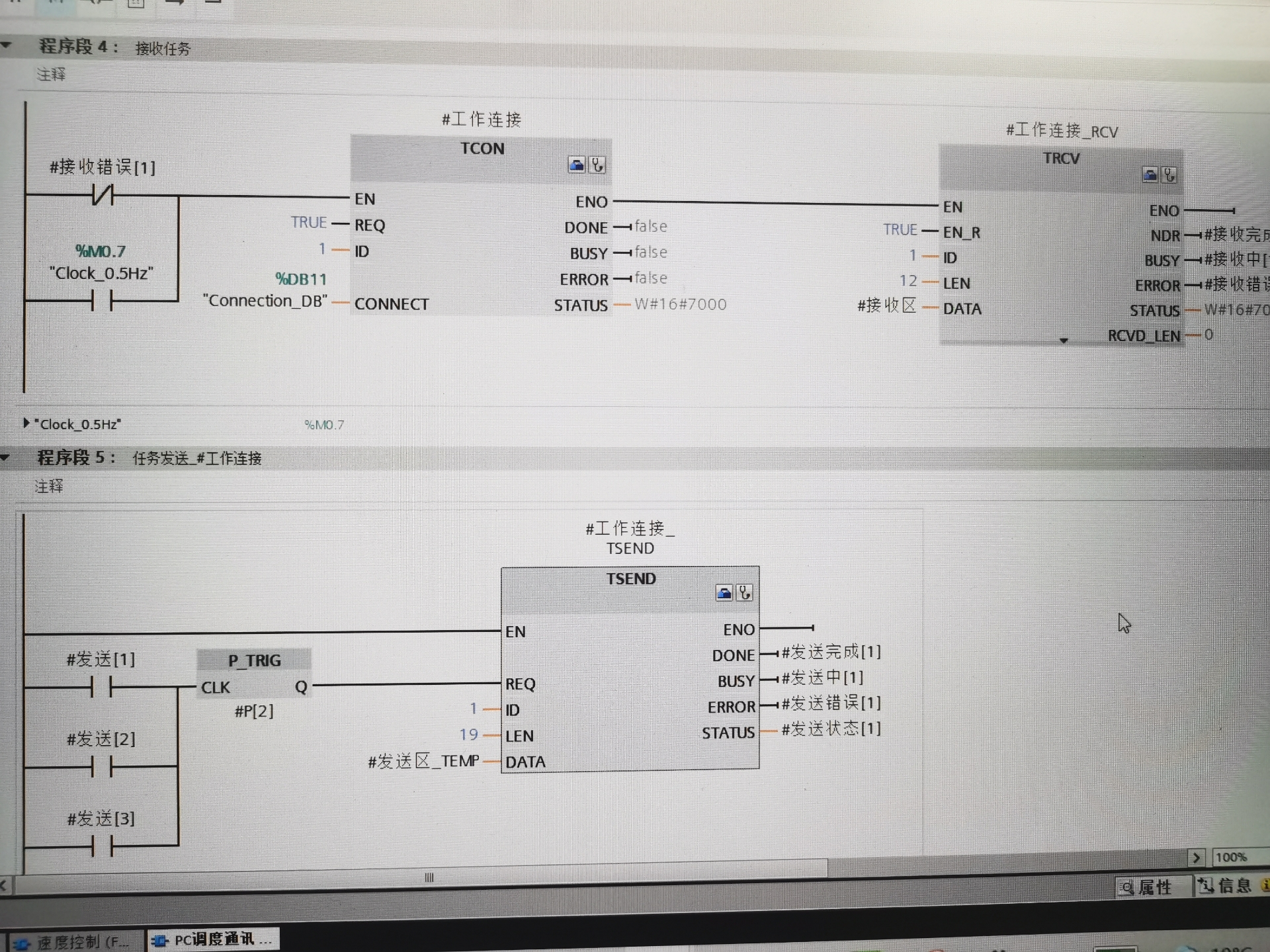
与上位机进行TCP通讯是摆渡车与整个仓储管理系统交互的关键。在博途1200中,我们可以借助指令轻松实现。以下是一段简单的SCL代码示例:
VAR
client : TCPClient; // 创建TCP客户端实例
connectResult : INT;
sendData : ARRAY[1..100] OF BYTE; // 发送的数据数组
receiveData : ARRAY[1..100] OF BYTE;
END_VAR
// 连接到上位机
connectResult := client.Connect('192.168.0.100', 102); // 填写上位机IP和端口号
IF connectResult = 0 THEN
// 连接成功,发送数据
client.Send(sendData);
// 接收数据
client.Receive(receiveData);
END_IF这段代码首先定义了一个TCP客户端实例client,尝试连接到指定IP和端口的上位机。连接成功后,便可以进行数据的发送与接收。通过这种通讯方式,上位机可以给摆渡车下达任务指令,比如前往指定位置,而摆渡车也能向上位机反馈自身状态。
二、定位的智慧:自制编码器定位与多位置处理
要实现摆渡车精确运行,自制编码器定位至关重要。我们通过采集编码器脉冲信号来确定位置。在结构化编程框架下,我们可以把编码器定位相关功能封装成一个功能块(FB)。
FUNCTION_BLOCK EncoderPositioning
VAR_INPUT
encoderPulse : INT; // 编码器脉冲输入
pulsePerMeter : REAL; // 每米脉冲数
END_VAR
VAR_OUTPUT
currentPosition : REAL; // 当前位置
END_VAR
// 计算当前位置
currentPosition := encoderPulse / pulsePerMeter;在主程序中调用这个功能块,就可以实时获取摆渡车的位置。对于多位置处理,我们可以建立一个位置表,每个位置对应一个编号和目标坐标。当上位机下达前往某个位置的指令时,程序通过查找位置表,结合当前位置计算出行驶方向和距离。
三、调速的奥秘:模拟量调速
模拟量调速为摆渡车运行提供了灵活性。在博途1200中,我们通过读取模拟量输入模块的值来调整摆渡车的速度。
VAR
analogValue : INT; // 模拟量输入值
speed : REAL;
END_VAR
// 读取模拟量值,假设模拟量范围0 - 27648对应速度0 - 10m/s
analogValue := AIW0; // 假设模拟量输入地址为AIW0
speed := analogValue * 10.0 / 27648.0;
// 设置摆渡车速度
SetSpeed(speed); // 假设SetSpeed为设置速度的功能块通过这样的代码逻辑,我们可以根据实际需求,通过模拟量输入设备(如电位器)轻松调整摆渡车的运行速度。
四、编程秘籍:SCL与梯形图混编及结构化编程框架
采用SCL与梯形图混编,发挥两者优势。SCL适合复杂的数学计算和逻辑处理,像前面的通讯、定位和调速代码用SCL编写简洁高效。而梯形图则直观易懂,适合处理一些简单的开关量逻辑,比如设备的启停控制。
仓储物流摆渡车程序,博途1200程序, 与上位机TCP通讯,赠送SCL学习资料。 自制编码器定位,多位置处理,模拟量调速, 采用SCL与梯形图混编, 结构化编程框架,
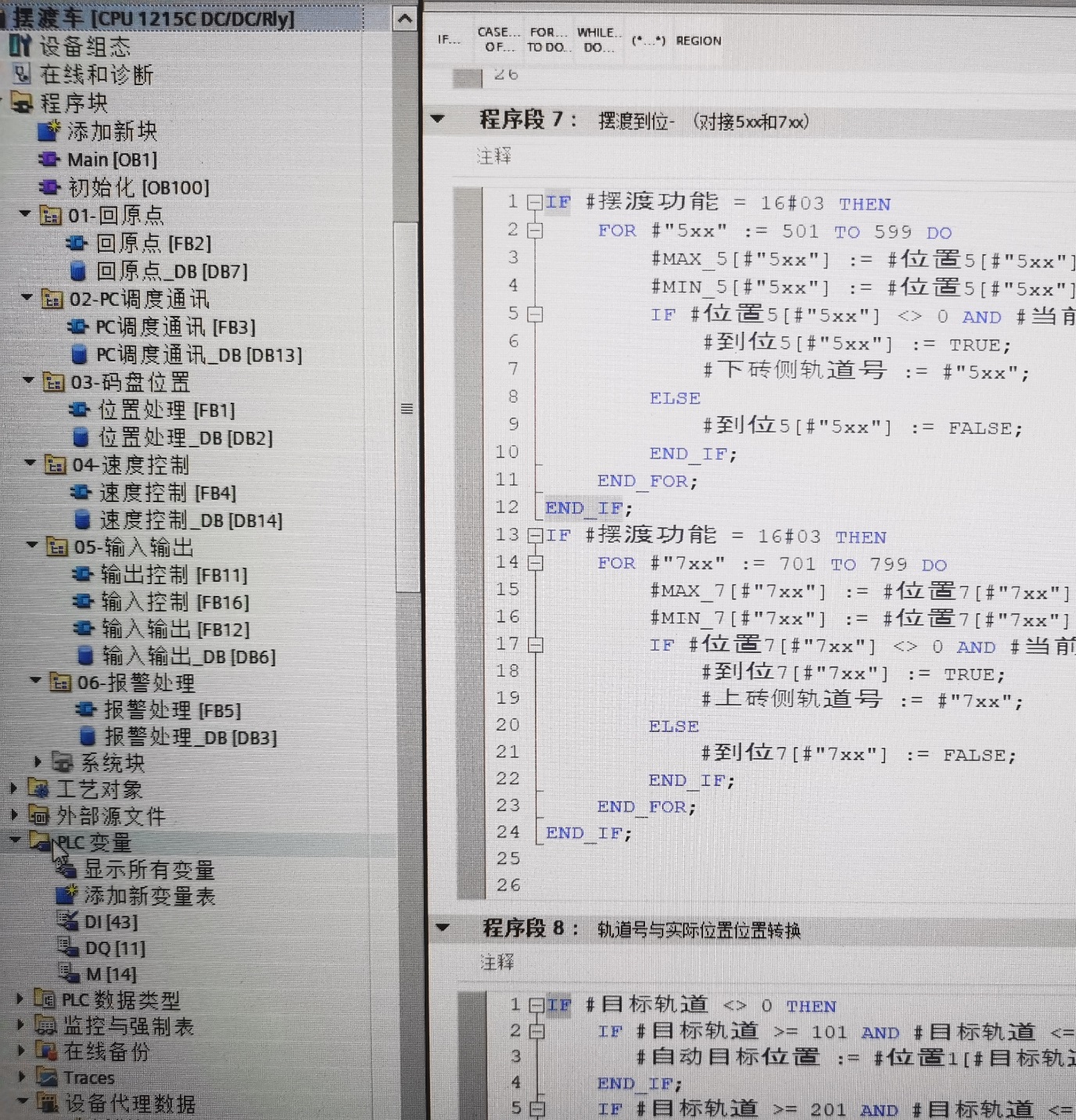
在结构化编程框架下,我们把不同功能封装成功能块(FB)和函数(FC)。这样程序结构清晰,易于维护和扩展。比如上面提到的编码器定位功能块、速度设置功能块等,每个功能块专注于一项特定功能,整个程序就像搭积木一样搭建起来。
希望通过这篇博文,大家对仓储物流摆渡车的博途1200程序开发有更深入的了解。需要SCL学习资料的朋友,可在评论区留言获取哦!

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 10
10 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)