
西门子1500PLC在仓储物流立体仓库项目中的实践
西门子1500PLC仓储物流 立体仓库程序,附带图纸堆垛机西门子PLC程序+输送线程序。物流仓储。1.涵盖通信,算法,运动控制,屏幕程序,可电脑仿真测试,实际项目完整程序。3.西门子S7-12004.博途V16编程5.采用SCL+FB高级编程语言混编,无加密。6.两套PLC程序,两套触摸屏程序,整线堆垛机完整的项目最近捣鼓了一个超有意思的项目——西门子1500PLC仓储物流立体仓库程序,今天来和大
西门子1500PLC仓储物流 立体仓库程序,附带图纸堆垛机西门子PLC程序+输送线程序。 物流仓储。 1.涵盖通信,算法,运动控制,屏幕程序,可电脑仿真测试,实际项目完整程序。 3.西门子S7-1200 4.博途V16编程 5.采用SCL+FB高级编程语言混编,无加密。 6.两套PLC程序,两套触摸屏程序,整线堆垛机 完整的项目
最近捣鼓了一个超有意思的项目——西门子1500PLC仓储物流立体仓库程序,今天来和大伙分享分享,顺便给想搞这方面开发的小伙伴们一些参考。
项目整体架构
这个项目可不光是简单的PLC编程,它涵盖了通信、算法、运动控制以及屏幕程序等多个关键部分,而且还能在电脑上进行仿真测试,实际项目里用到的完整程序都在这儿啦。项目中有两套PLC程序(针对堆垛机和输送线),还有两套触摸屏程序,整线堆垛机配合得相当紧密。
编程工具与语言
编程工具用的是博途V16,这可是西门子编程的得力助手,功能强大且界面友好。编程语言采用了SCL(结构化控制语言)和FB(功能块)高级编程语言混编的方式,重点是,代码无加密哦,这对咱们学习和二次开发来说简直太友好了。
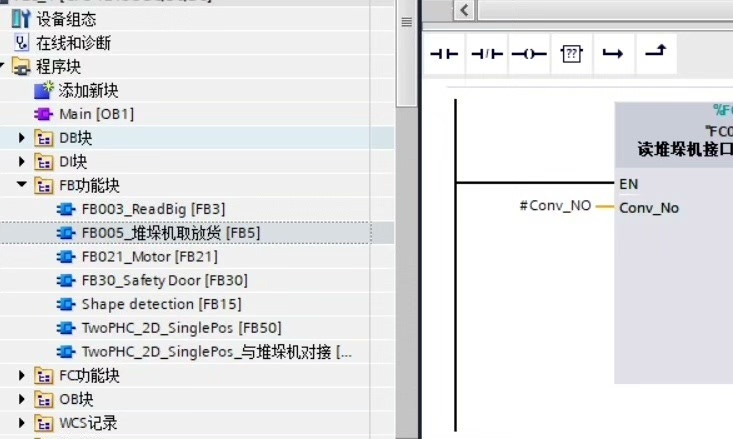
堆垛机PLC程序剖析
先来说说堆垛机的程序,它作为立体仓库里货物搬运的关键角色,程序的复杂性和重要性不言而喻。
// 定义堆垛机位置变量
VAR
StackerPosition : INT;
END_VAR
// 堆垛机上升功能块调用
FB_StackerUp(
Enable := StackerUpButton,
Position := StackerPosition,
Speed := 100
);在上面这段代码里,咱们先定义了一个变量 StackerPosition 用来记录堆垛机的位置,这在整个堆垛机的运动控制中非常关键,就像给堆垛机装了个“定位器”。然后调用了一个自定义的功能块 FB_StackerUp,这个功能块接收三个参数:使能信号 Enable 来自上升按钮 StackerUpButton,这样当按钮按下时堆垛机上升功能才会启动;当前位置 Position 就是咱们刚刚定义的变量,方便程序实时知道堆垛机在哪里;速度 Speed 设置为100,这个速度值可以根据实际需求调整,就像给堆垛机设置“行驶速度”一样。
输送线程序亮点
输送线程序也不简单,它要保证货物能平稳、准确地输送到指定位置。
// 定义输送线电机状态变量
VAR
ConveyorMotorStatus : BOOL;
END_VAR
// 输送线电机控制逻辑
IF ConveyorStartButton THEN
ConveyorMotorStatus := TRUE;
// 开启电机相关的逻辑,比如设置速度等
ConveyorMotorSpeed := 50;
ELSE
ConveyorMotorStatus := FALSE;
END_IF;这里定义了一个布尔变量 ConveyorMotorStatus 来表示输送线电机的状态,电机是开还是关就靠它来体现了。然后通过一个条件判断语句,当 ConveyorStartButton 按钮按下时,电机状态变量 ConveyorMotorStatus 置为 TRUE,同时给电机设置速度为50,就像给输送线按下了“启动键”并且设置了运行速度。如果按钮没按下,电机状态就设为 FALSE,电机停止运行。
通信部分
通信在这个项目里也起到了穿针引线的作用,不管是PLC之间,还是PLC与触摸屏之间,都得靠通信来传递数据和指令。在博途V16里,配置通信参数是个关键步骤。
// 配置与触摸屏的通信连接
COMM_LOAD(
COMM_PARAMETER := 'TOUCHSCREEN',
BAUD_RATE := 115200,
PARITY := 'NONE'
);上面这段代码使用了 COMMLOAD 功能块来配置与触摸屏的通信连接。COMMPARAMETER 参数指定了通信对象为触摸屏 'TOUCHSCREEN';BAUD_RATE 设置波特率为115200,这决定了数据传输的速度;PARITY 设置奇偶校验为 'NONE',也就是不进行奇偶校验,这样能简化通信过程,提高传输效率。
算法和运动控制
算法部分涉及到货物存储位置的计算、堆垛机和输送线运动路径规划等。运动控制则基于前面提到的算法,精确控制堆垛机和输送线的运动。
// 计算堆垛机目标位置算法示例
VAR
TargetPosition : INT;
CurrentPosition : INT;
Distance : INT;
BEGIN
CurrentPosition := StackerPosition;
TargetPosition := GetTargetPosition(); // 假设这个函数获取目标位置
Distance := TargetPosition - CurrentPosition;
// 根据距离调整堆垛机速度
IF Distance > 100 THEN
StackerSpeed := 200;
ELSE
StackerSpeed := 100;
END_IF;
END;在这段代码里,先获取了堆垛机的当前位置 CurrentPosition 和目标位置 TargetPosition,通过相减得到两者之间的距离 Distance。然后根据距离来调整堆垛机的速度,如果距离大于100,就把速度设为200,这样堆垛机可以更快地接近目标位置;如果距离小于等于100,就把速度降为100,保证能精确停在目标位置,是不是很巧妙呢?
屏幕程序
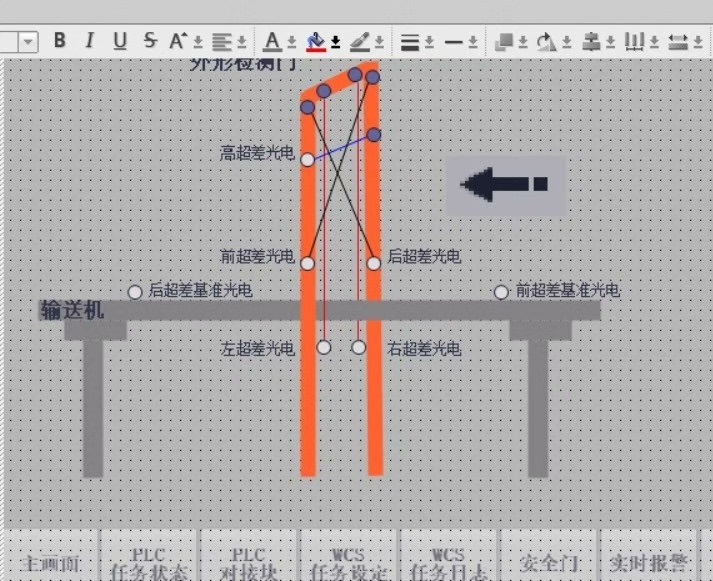
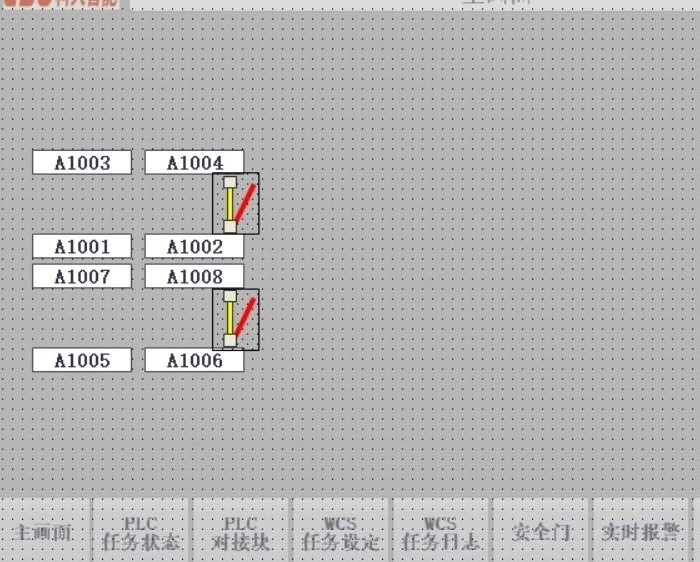
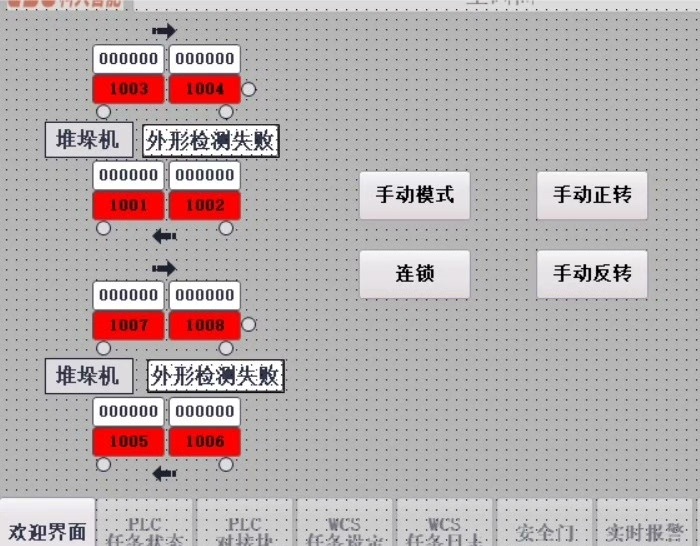
屏幕程序主要负责和操作人员进行交互,让操作人员能直观地监控和控制整个仓储物流系统。在博途V16里设计触摸屏界面也很方便。比如显示堆垛机和输送线的状态、设置各种参数等。
// 将堆垛机位置数据发送到触摸屏显示
SEND_DATA_TO_TOUCHSCREEN(
Data := StackerPosition,
DataName := 'Stacker_Position'
);上面这段代码通过自定义的 SENDDATATOTOUCHSCREEN 功能块,把堆垛机位置数据 StackerPosition 发送到触摸屏,并给这个数据命名为 'StackerPosition',这样在触摸屏界面上就能显示堆垛机的实时位置啦。
西门子1500PLC仓储物流 立体仓库程序,附带图纸堆垛机西门子PLC程序+输送线程序。 物流仓储。 1.涵盖通信,算法,运动控制,屏幕程序,可电脑仿真测试,实际项目完整程序。 3.西门子S7-1200 4.博途V16编程 5.采用SCL+FB高级编程语言混编,无加密。 6.两套PLC程序,两套触摸屏程序,整线堆垛机 完整的项目
总的来说,这个西门子1500PLC仓储物流立体仓库项目,从通信到算法,从运动控制到屏幕程序,每个部分都紧密相连,协同工作,构成了一个高效、智能的仓储物流系统。希望我的分享能给大家在相关项目开发中带来一些启发!

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 0
0 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)