
智慧仓储料箱提升机系统的数字孪生三维可视化实现路径分析
三维可视化实现关键技术包括:1)多源数据采集(设备数据与业务系统对接);2)三维模型构建(采用LOD技术平衡精度与性能);3)数据驱动动态呈现(实时数据与模型绑定);4)交互功能开发(视角操控、信息查询等)。实施要点在于性能优化、坐标统一和数据标准化,最终将抽象数据转化为直观的可视化展示。
各步骤核心技术要点
第一步:多源数据采集与接入
这是三维可视化的“原料”来源,需建立稳定数据管道。
-
设备层数据:通过OPC UA、MQTT等协议,从提升机的PLC、传感器实时读取核心数据(如当前楼层、载货台高度、运行方向(上/下/停)、速度、门状态、故障代码)
-
业务系统数据:通过API与WMS/WCS对接,获取任务信息(如任务ID、源/目标货位、料箱编号)、库存信息和订单状态,使可视化能反映业务逻辑
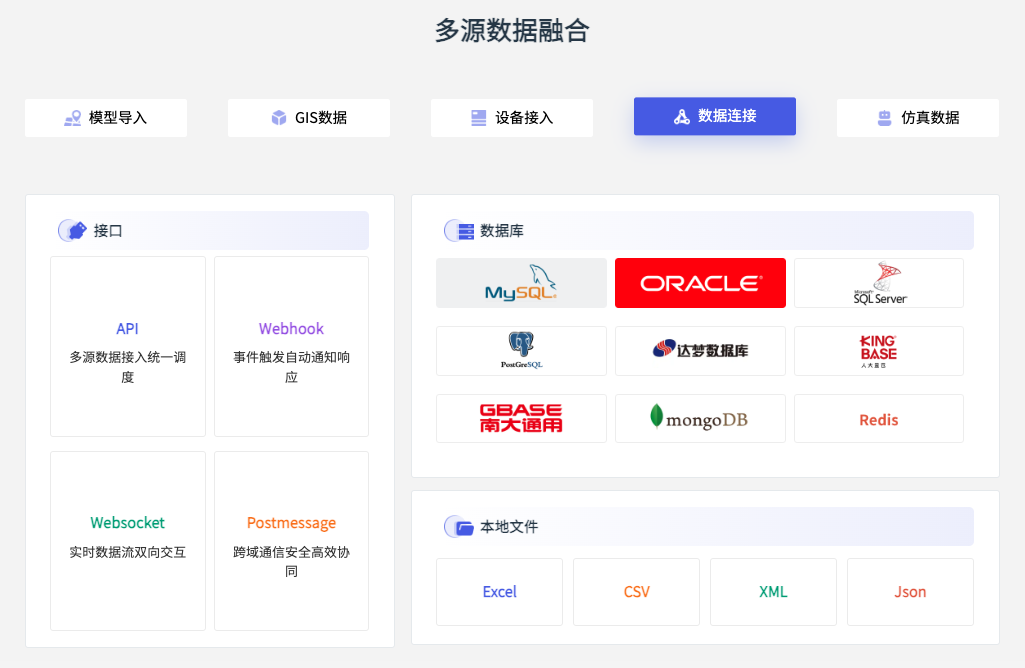
数字孪生开发工具CIMPro孪大师支持对接的数据

数字孪生开发工具CIMPro孪大师支持对接的设备
第二步:三维模型与场景构建
这是三维可视化的静态“骨架”,追求精确与性能平衡。
建模标准
-
根据展示需求选择模型精度。LOD(多细节层次)技术是关键,即近处用高模(数万面)、远处用低模(数千面),以平衡画质与加载速度。
模型类型:
-
几何模型:使用 3ds Max, Blender, SolidWorks 等构建设备、货架、料箱的外形
-
动画模型:预先制作提升机循环运行的上升/下降动画、门开闭动画、料箱出入动画等,供实时调用

数字孪生开发工具CIMPro孪大师支持导入的模型
第三步:数据驱动与动态呈现
这是让静态模型“活”起来的核心,实现虚实同步。
数据映射:编写逻辑脚本,将实时数据流与模型动画、状态绑定。
例如:
-
将“载货台高度”数据映射到提升机模型的Y轴坐标
-
将“任务执行中”状态映射为料箱模型高亮闪烁
-
将“故障代码”映射为设备模型变为红色并弹出告警
-
状态管理:根据数据动态控制模型的显示/隐藏(如空货位)、颜色变化(如任务占用、库存异常)、动画播放(如提升机运行、输送线转动)
数字孪生开发工具CIMPro孪大师故障告警设置
第四步:交互与部署
这是为用户提供价值的关键,确保易用与可访问。
交互功能:
-
视角操控:第一人称漫游、环绕观察、缩放平移
-
信息查询:点击设备或货位,弹出数据面板,显示实时状态、任务详情、维护记录
-
场景剖切:实现水平或垂直剖切功能,查看货架内部密集存储情况
第一人称漫游查看设备状态
发布与集成:
-
引擎选择:客户端软件适合高保真、交互复杂的本地或大屏应用,如CIMPro孪大师
-
部署形式:可独立发布为文件,或通过iframe/API嵌入现有仓储管理平台

实施关键注意事项
-
性能优先:在建模阶段就必须考虑优化,严格控制面数,合理使用贴图烘焙光影,这是保障大规模场景流畅运行的基础
-
坐标系统一:确保三维场景的世界坐标系与物理仓库的实际坐标精确对应,这是实现精确定位和反向控制(如有)的前提
-
数据协议标准化:与设备层和业务层约定统一、简洁的数据接口协议(如JSON格式),降低后期集成与维护难度
总结而言,料箱提升机三维可视化的实现,是一个从数据接入、模型构建、数据驱动到交互集成的连贯过程。其核心价值在于将抽象的代码和多源数据,转化为一眼可懂的视觉语言,让管理者能瞬间洞察全局状态。

如果你能分享更具体的应用场景(例如是用于新仓库规划,还是对现有系统改造),我可以提供更具针对性的技术选型建议。

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)