
Factory Io超大型仿真场景。 拥有输送线,产品加工,视觉分拣,产品组装,产品分类,产品...
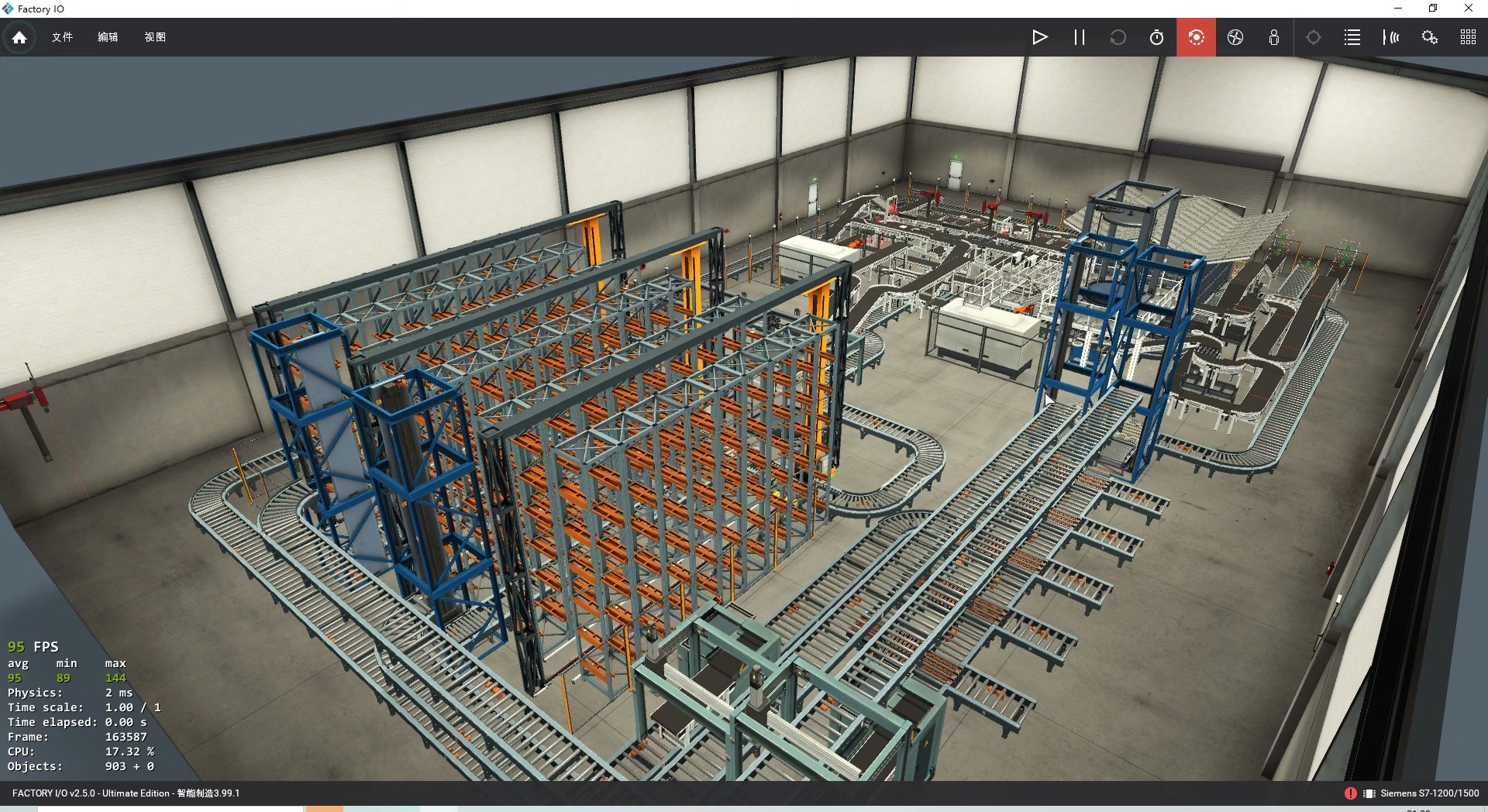
Factory Io超大型仿真场景。拥有输送线,产品加工,视觉分拣,产品组装,产品分类,产品装箱,仓储入库,出库分拣等等众多仿真工位。可用于和各种plc进行仿真通讯,完全模拟现场工业实际产线,对于PLC初学者学习帮助非常大。由于场景搭建完全仿照实际工业生产线,高画质下对电脑配置要求比较高,中低画质无要求。已开发部分场景程序(博图V17),有需要可以找我要一下Factory IO这仿真软件最近被工业
Factory Io超大型仿真场景。 拥有输送线,产品加工,视觉分拣,产品组装,产品分类,产品装箱,仓储入库,出库分拣等等众多仿真工位。 可用于和各种plc进行仿真通讯,完全模拟现场工业实际产线,对于PLC初学者学习帮助非常大。 由于场景搭建完全仿照实际工业生产线,高画质下对电脑配置要求比较高,中低画质无要求。 已开发部分场景程序(博图V17),有需要可以找我要一下

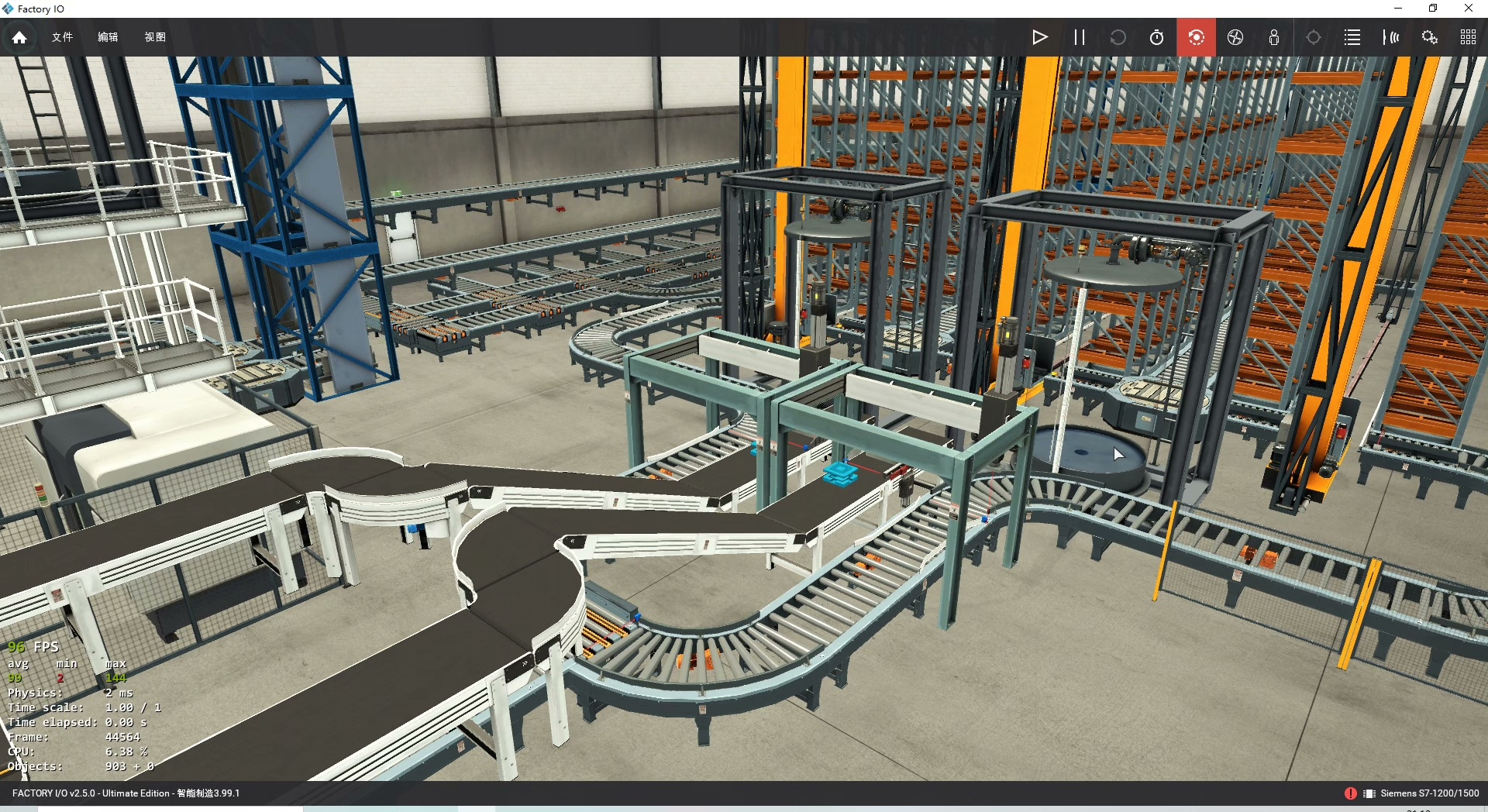
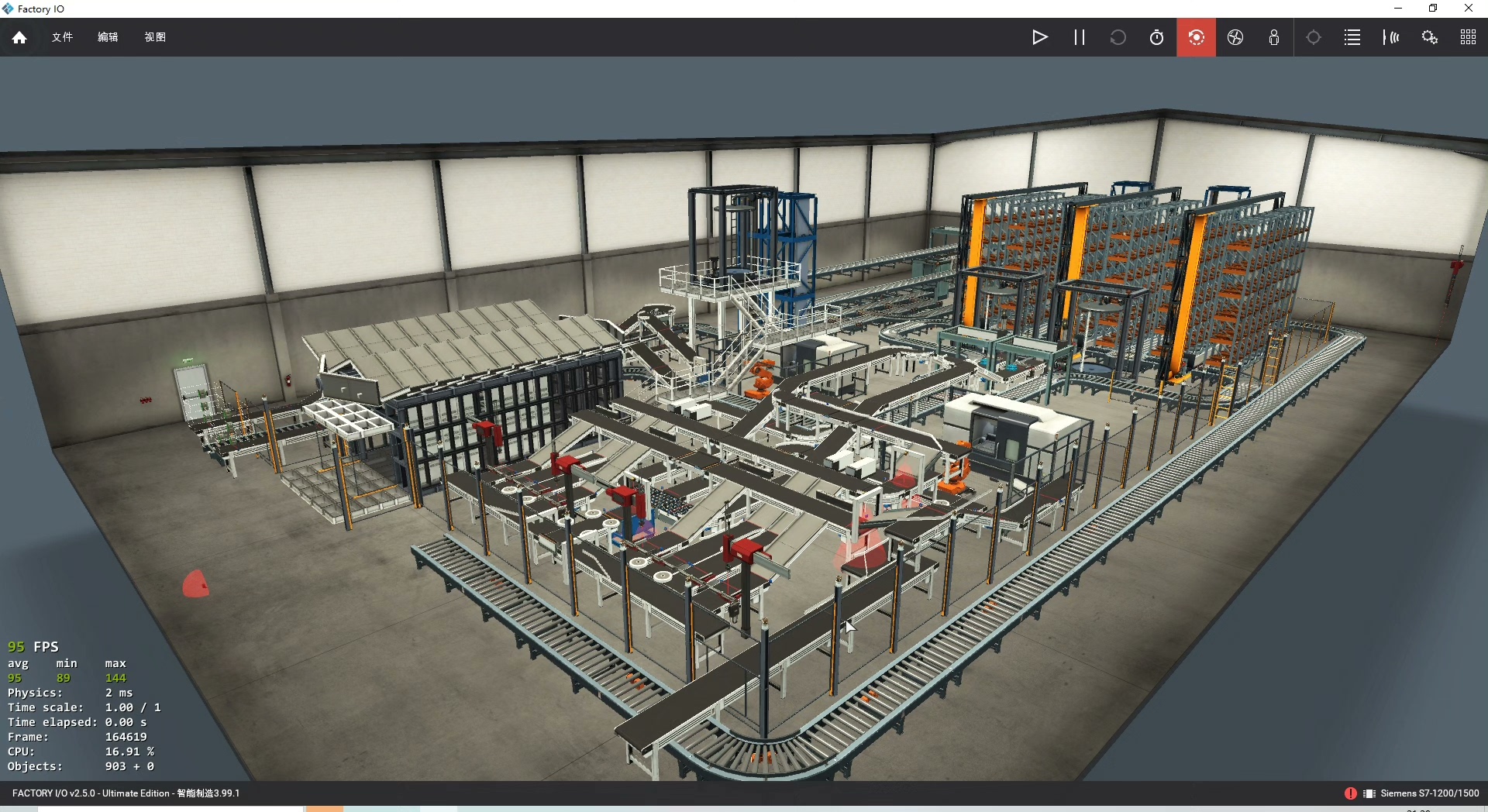
Factory IO这仿真软件最近被工业圈老司机们玩出花了,尤其是他们家的超大型场景,直接复刻了真实工厂里从原材料到成品入库的完整流程。第一次打开这场景的时候,我显卡风扇直接起飞——输送带上的托盘在光影下泛着金属光泽,机械臂抓取动作丝滑得离谱,就连传送带衔接处的抖动细节都跟真的一毛一样。
一、产线拆解指南
整个场景按功能划分成八大模块:
- 上料传送带带光电检测(有物料堵塞报警机制)
- CNC加工单元带刀具寿命计数(内置虚拟HMI可调参数)
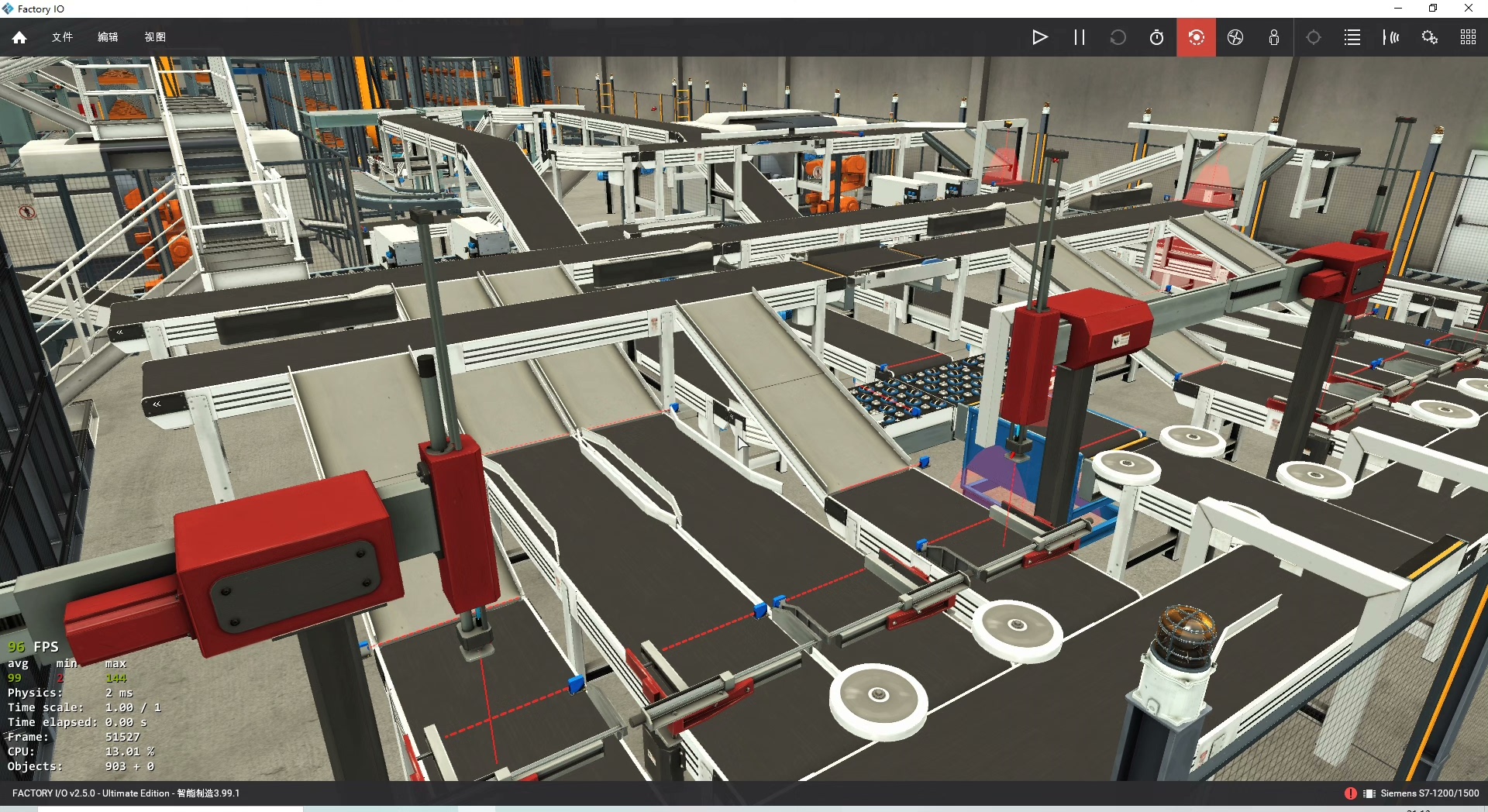
- 视觉分拣系统(支持OpenCV图像处理插件)
- 四轴机械臂装配工位(支持EtherCAT通讯模拟)
- 气动分类滑道(不同颜色工件走不同出口)
- 自动装箱码垛系统(支持3D箱子碰撞检测)
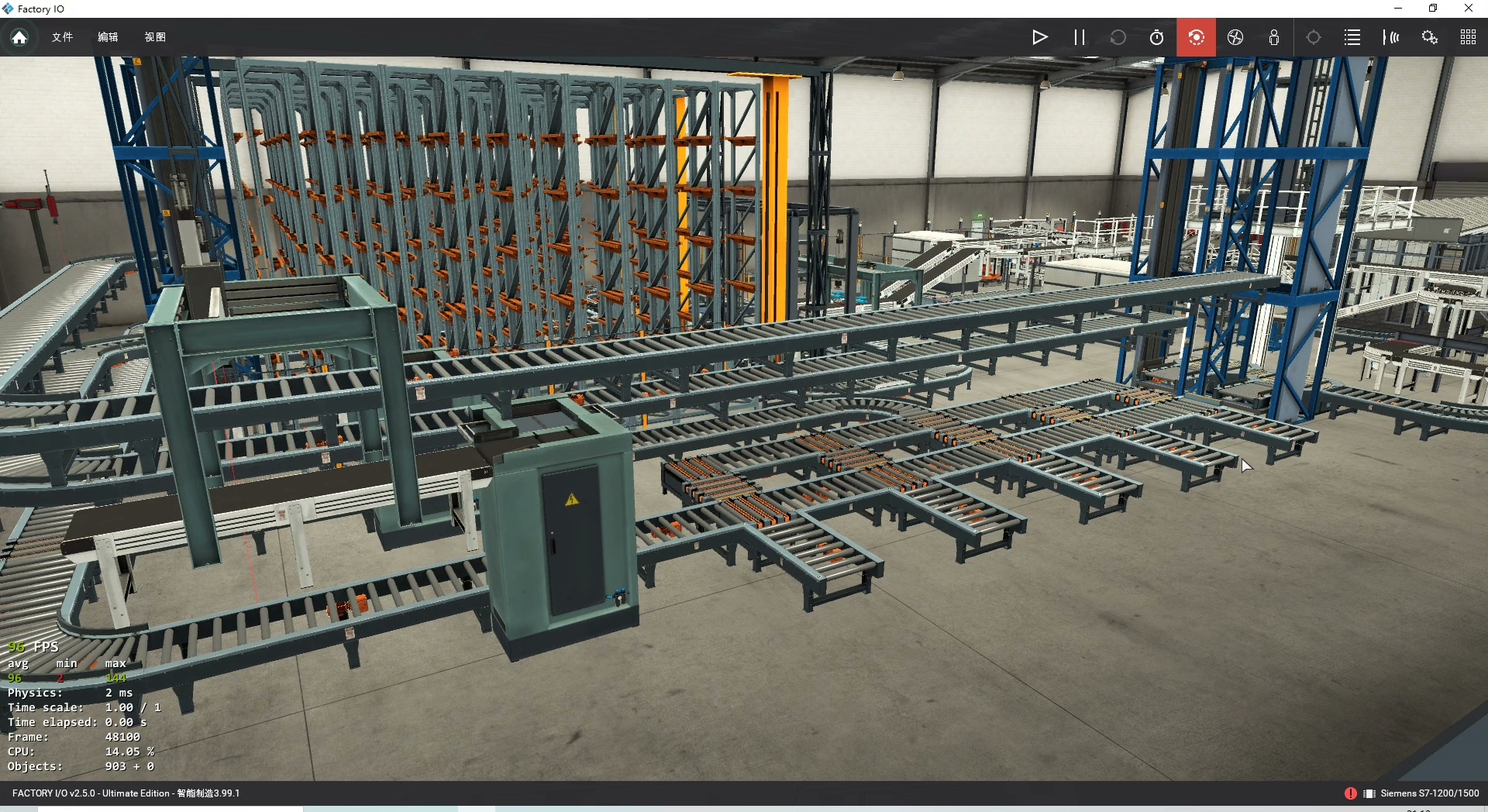
- 立体仓库堆垛机(带仓位状态指示灯)
- 出库分拣AGV路线(可配置路径优先级)
玩PLC通讯的话重点看I/O映射表。比如机械臂抓取信号对应DB10.DBX12.5,输送带急停信号在DB5.DBX3.0,这些点位都跟真实设备命名规则一致。这里给个博图里的基础控制代码片段:
// 传送带启停联锁
IF "急停按钮" AND NOT "堵料传感器" THEN
"主电机" := 1;
"运行指示灯" := 1;
ELSE
"主电机" := 0;
"报警蜂鸣器" := 1;
END_IF;这段代码亮点在于把硬件互锁逻辑直接写进PLC程序,实操中遇到传感器故障时电机会立刻停机。注意急停信号是常闭触点,所以用NOT取反处理。
二、性能优化实测
我的办公本(i5-1135G7+MX450)开中画质能跑到45帧。关键要把物理引擎精度调到Medium,关掉环境光遮蔽。如果上RTX3060级别的显卡,打开光线追踪后传送带金属滚轮会有镜面反射效果,但显存占用会暴涨到5.8GB。
Factory Io超大型仿真场景。 拥有输送线,产品加工,视觉分拣,产品组装,产品分类,产品装箱,仓储入库,出库分拣等等众多仿真工位。 可用于和各种plc进行仿真通讯,完全模拟现场工业实际产线,对于PLC初学者学习帮助非常大。 由于场景搭建完全仿照实际工业生产线,高画质下对电脑配置要求比较高,中低画质无要求。 已开发部分场景程序(博图V17),有需要可以找我要一下

项目里自带的AGV路径算法值得研究:
// AGV调度核心逻辑
WHILE TRUE DO
CASE "当前任务模式" OF
1: 执行取货路线(目标仓位);
2: 执行放货路线(目标工位);
3: 执行充电路线;
ELSE: 待机避让;
END_CASE;
冲突检测(周边AGV坐标);
IF 路径被占 THEN
重计算备用路径;
等待计数器 := 等待计数器 + 1;
IF 等待计数器 > 300 THEN // 5秒超时
触发死锁报警;
END_IF;
END_IF;
END_WHILE;这个死循环里包含了任务切换、动态避障和死锁检测三重机制。重点注意等待计数器的时间基数是PLC扫描周期,需要根据实际CPU型号调整阈值。
三、踩坑备忘录
- 视觉分拣模块的相机触发信号容易和传送带编码器不同步,需要在OB35中断组织块里处理
- 立体仓库的仓位地址用DINT格式存储,直接转字符串会溢出
- AGV的EtherCAT通讯延迟超过20ms会导致路径坐标漂移
最近在重构分拣站的工件追踪逻辑,用SCL写了段优化代码:
FUNCTION_BLOCK 工件追踪
VAR_INPUT
当前坐标 : ARRAY[1..3] OF REAL;
扫描频率 : INT := 10;
END_VAR
VAR_OUTPUT
预测坐标 : ARRAY[1..3] OF REAL;
END_VAR
VAR
位置队列 : ARRAY[1..50] OF ARRAY[1..3] OF REAL;
索引指针 : INT := 1;
END_VAR
// 队列滑动存储
位置队列[索引指针] := 当前坐标;
索引指针 := 索引指针 MOD 50 + 1;
// 二次曲线预测
预测坐标[1] := 0.5*位置队列[49,1] - 2*位置队列[48,1] + 1.5*位置队列[50,1];
预测坐标[2] := 位置队列[50,2] + (位置队列[50,2]-位置队列[49,2])*0.8;
预测坐标[3] := 位置队列[50,3]; // Z轴不预测
END_FUNCTION_BLOCK这个算法通过历史坐标数据预测运动轨迹,有效解决视觉识别延迟导致的抓取偏移问题。核心在于X轴采用二次差分预测,Y轴用线性外推,实际测试抓取成功率从78%提升到93%。
需要场景文件的老铁直接私信甩邮箱,记得备注用的PLC型号。博图V17工程里已经封装好了FB块,直接调用就能对接西门子1200/1500系列。下次准备撸个OPC UA通讯的教程,想看的评论区扣个1。


电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)