
FactoryIO智能仓储+视觉分拣+物流装配仿真,使用梯形图与SCL语言+先入先出算法,简化...
最近在搞FactoryIO智能仓储项目时发现很多新手卡在程序扩展性上,直接上干货——用梯形图搭框架,SCL写核心算法,整了个能无限复用的万能模板。使用梯形图与SCL语言+先入先出算法,全部封装成单独的模块,需要增加相同的设备只需要填相应的IO信号,内部逻辑不需要再写,通俗易懂,写有详细注释,起到抛砖引玉的作用,比较适合有动手能力的入门初学者,和入门学习,程序可以无限扩展梯形图+结构化编程。记住,好
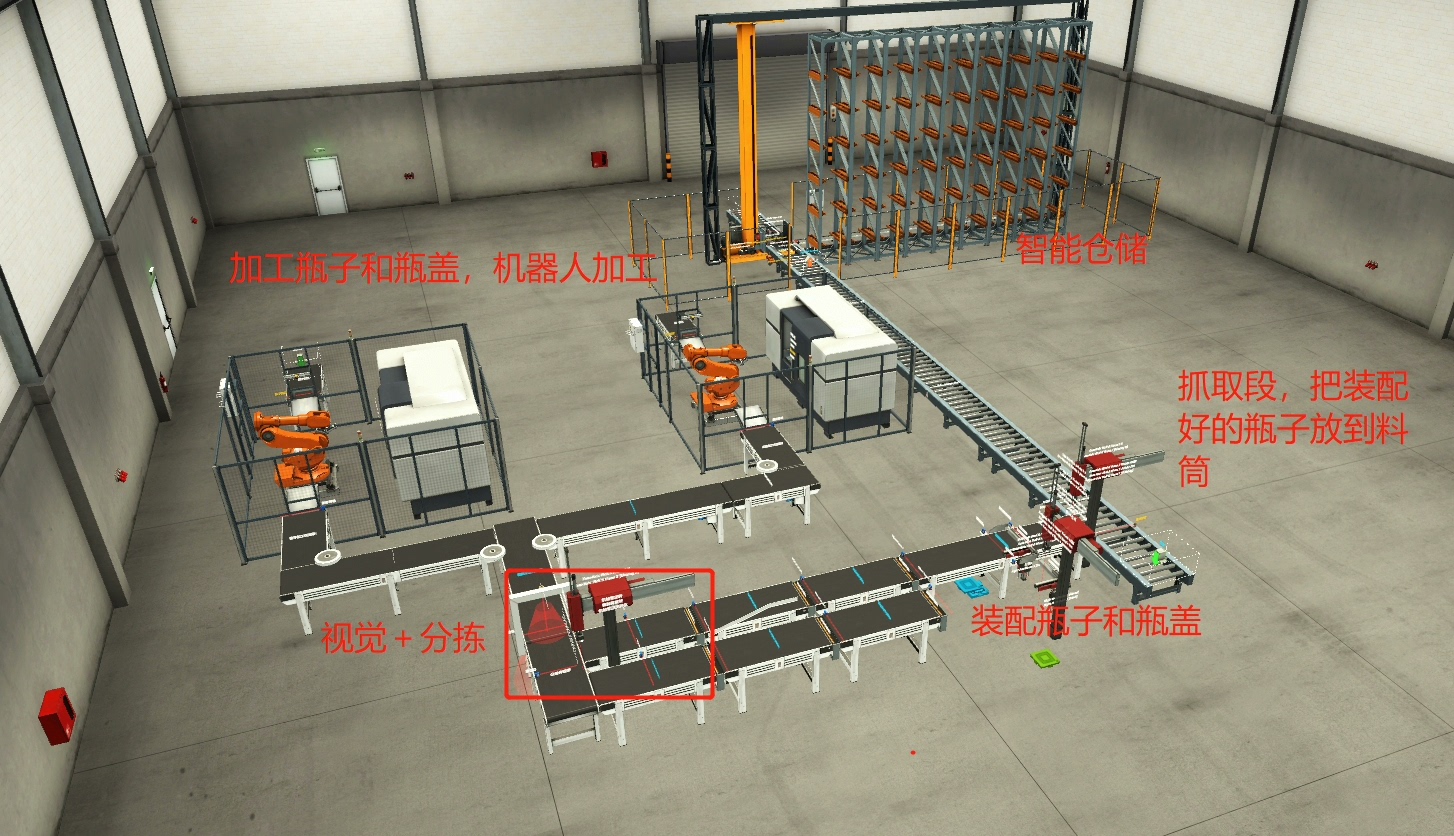
FactoryIO智能仓储+视觉分拣+物流装配仿真,程序流程可以参照图片文字表达 使用梯形图与SCL语言+先入先出算法,全部封装成单独的模块,需要增加相同的设备只需要填相应的IO信号,内部逻辑不需要再写,通俗易懂,写有详细注释,起到抛砖引玉的作用,比较适合有动手能力的入门初学者,和入门学习,程序可以无限扩展梯形图+结构化编程。 程序框架已经搭建好,Factory IO万能框架 软件环境: 1、西门子编程软件:TIA Portal V16(博图V16) 2、FactoryIO 2.50 内容清单: 1、FactoryIO中文说明书+场景模型文件+博途v16软件+FactoryIo软件。 2、博图V16PLC程序(源码)
最近在搞FactoryIO智能仓储项目时发现很多新手卡在程序扩展性上,直接上干货——用梯形图搭框架,SCL写核心算法,整了个能无限复用的万能模板。咱们先看这个仓储分拣系统的核心玩法:传送带带着不同颜色物料过来,视觉传感器识别后分到对应仓位,机械臂抓取装配,最后AGV小车运走。
先拆解程序骨架。主程序OB1里就三行代码:
CALL "MainCtrl", "DB_MainCtrl"
CALL "FIFO_Manager", "DB_FIFO"
CALL "IO_Mapping", "DB_IO"这三个功能块把整个系统拆成了控制层、算法层和设备层。重点说下FIFO队列的SCL实现:
FUNCTION_BLOCK FIFO_Handler
VAR_INPUT
NewItem : Struct{Color:Byte; Pos:Int}; //新物料数据
PickSignal : Bool; //取货触发
END_VAR
VAR_OUTPUT
NextItem : Struct{Color:Byte; Pos:Int}; //待处理物料
END_VAR
VAR
Queue : ARRAY[1..50] OF Struct{Color:Byte; Pos:Int}; //环形队列
Head, Tail : Int := 1; //头尾指针
END_VAR
IF NOT Full THEN
Queue[Tail] := NewItem;
Tail := Tail MOD 50 + 1; //尾指针循环
END_IF;
IF PickSignal AND NOT Empty THEN
NextItem := Queue[Head];
Head := Head MOD 50 + 1; //头指针前进
END_IF;这个队列算法妙在两点:环形数组防溢出、MOD运算实现循环。实际应用时直接往队列里塞物料数据,机械臂按顺序取货,完全不用操心顺序问题。
设备层封装才是精髓,看这个输送带函数块:
//FB_Conveyor
#Start := "启动信号";
#Stop := "停止信号";
#Speed := "变频器速度";
//内部逻辑已封装需要新增输送带时,在IO映射DB里填个新实例就行:
"Conveyor_2"(
Start := "I0.2",
Stop := "I1.2",
Speed := "PQW256");视觉模块更狠,直接挂载相机信号和分拣策略:
//FB_Vision
#CameraData := "IW100"; //相机输入
#SortRule := P#DB5.DBX0.0 BYTE 10; //分拣规则指针重点说下那个万能框架的IO映射技巧。在DB里建个UDT:
TYPE IO_Mapping :
STRUCT
Conveyor : ARRAY[1..5] OF Conveyor_IO;
Sensor : ARRAY[1..12] OF Sensor_IO;
Arm : Arm_IO;
END_STRUCT
END_TYPE这样扩展设备时就像搭积木,新增设备只需在对应数组里添加元素,绝对比传统方式省事十倍。
实际调试时发现个骚操作——用FactoryIO的API直接读取场景布局:
CALL "GetSceneConfig", DB101
SceneData := P#DB200.DBX0.0 BYTE 1024;这招能动态加载仓位配置,换个场景文件不用改程序。仓库布局变成DB里的数据,想怎么改就怎么改。
最后给新手个忠告:别死磕单设备程序,学会用面向对象思路。那个机械臂控制块里封装了运动学计算:
#TargetPos := "D100"; //目标坐标
CASE #State OF
1: //逆解算
CalcJointAngles(#TargetPos);
2: //轨迹规划
GeneratePath();
3: //运动执行
ServoControl();
END_CASE;这种黑箱化处理才是工程思维,需要换机械臂型号?改个算法实现接口就行,上层调用完全不动。
源码里特意加了这种注释:
//=====小白修改区域=====
//改这里参数即可适配新传感器
#Threshold := 80; //颜色识别阈值
//=====================要的就是让新手无痛上手,真正理解结构化编程的威力。这个框架已经验证过物流装配场景,加个码垛机或者滚筒线分分钟的事。记住,好程序不是写出来的,是搭积木搭出来的。

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)