
西门子1500PLC仓储物流立体仓库程序大揭秘
西门子1500PLC仓储物流 立体仓库程序,附带图纸堆垛机西门子PLC程序+输送线程序。物流仓储。1.涵盖通信,算法,运动控制,屏幕程序,可电脑仿真测试,实际项目完整程序。3.西门子S7-12004.博途V16编程5.采用SCL+FB高级编程语言混编,无加密。6.两套PLC程序,两套触摸屏程序,整线堆垛机在物流仓储领域,自动化立体仓库正发挥着越来越重要的作用。
西门子1500PLC仓储物流 立体仓库程序,附带图纸堆垛机西门子PLC程序+输送线程序。 物流仓储。 1.涵盖通信,算法,运动控制,屏幕程序,可电脑仿真测试,实际项目完整程序。 3.西门子S7-1200 4.博途V16编程 5.采用SCL+FB高级编程语言混编,无加密。 6.两套PLC程序,两套触摸屏程序,整线堆垛机
在物流仓储领域,自动化立体仓库正发挥着越来越重要的作用。今天就来跟大家分享一下基于西门子1500PLC的仓储物流立体仓库程序,其中包含堆垛机西门子PLC程序以及输送线程序,还附带图纸哦,绝对干货满满!
编程基础
本次项目采用博途V16进行编程,使用的PLC是西门子S7 - 1200 。编程语言上,采用了SCL(结构化控制语言)与FB(功能块)高级编程语言混编的方式,而且程序无加密,方便大家研究学习。
SCL语言优势
SCL语言类似于高级编程语言,像C语言或者Pascal语言,这对于有编程基础的人来说非常友好。比如,我们在处理复杂的算法逻辑时,SCL就展现出了极大的优势。
// 计算堆垛机移动距离的简单示例
VAR
targetPosition : INT; // 目标位置
currentPosition : INT; // 当前位置
distanceToMove : INT; // 需要移动的距离
END_VAR
distanceToMove := targetPosition - currentPosition;在这段代码里,通过简单的变量定义和减法运算,就能轻松得出堆垛机需要移动的距离。这种基于表达式和语句块的编程方式,使得复杂逻辑的实现变得更加简洁明了。
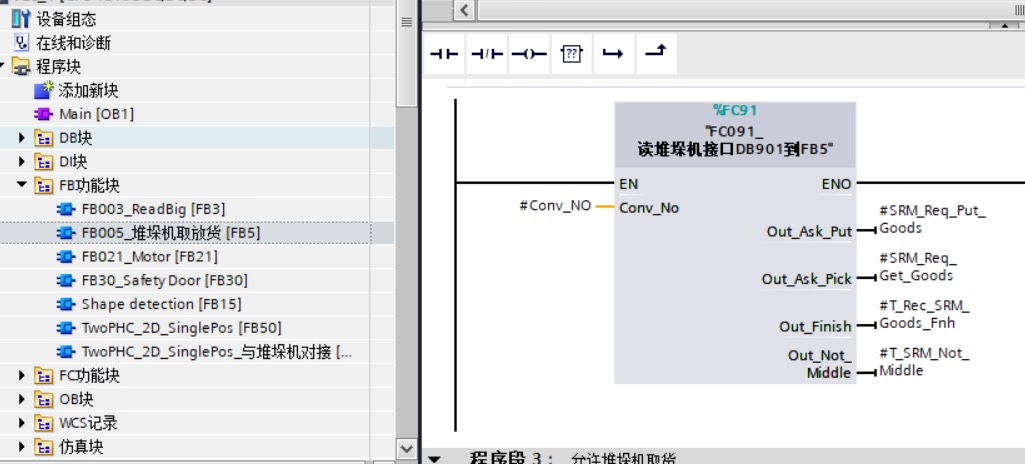
FB功能块的魅力
FB功能块则可以将一些常用的功能封装起来,提高代码的复用性。比如说,我们把堆垛机上升、下降、前进、后退等基本动作封装成一个个FB功能块。
// 假设已经定义好了MoveUp的FB功能块
CALL MoveUp(
Enable := TRUE, // 使能信号
Speed := 100, // 速度
Distance := 50 // 移动距离
);这样在主程序中,当需要堆垛机上升时,直接调用这个功能块,并传入相应的参数即可,大大简化了编程流程,同时也便于程序的维护和管理。
通信实现
通信在整个立体仓库系统中至关重要。无论是堆垛机与输送线之间的协同工作,还是PLC与上位机的信息交互,都离不开通信。在博途V16中,实现通信相对便捷。以S7通信为例,我们可以通过配置网络连接来实现不同设备之间的数据交换。
S7通信配置
- 在博途软件中,打开“设备和网络”视图。
- 分别添加堆垛机PLC和输送线PLC设备,并设置好各自的IP地址。
- 创建S7连接,指定连接伙伴的IP和TSAP等参数。
// 发送数据示例
VAR
sendBuffer : ARRAY[0..9] OF BYTE; // 发送缓冲区
sendDone : BOOL; // 发送完成标志
END_VAR
// 填充发送缓冲区数据
sendBuffer[0] := 16#41;
sendBuffer[1] := 16#42;
//...
S7_SEND(
CONNECT := #S7_connection, // S7连接
REQ := TRUE, // 发送请求
DATA := PEEK(sendBuffer), // 要发送的数据
DONE => sendDone // 发送完成标志输出
);上述代码展示了如何使用S7_SEND功能块向连接的设备发送数据。通过REQ触发发送请求,DATA指定发送的数据缓冲区,当发送完成后,DONE标志置位。
算法与运动控制
立体仓库的高效运行离不开精准的算法和运动控制。
堆垛机运动算法
堆垛机需要根据货物的存储位置和当前位置,计算出最佳的运动路径。这涉及到位置计算、速度规划等算法。
// 简单的速度规划算法示例
VAR
currentSpeed : REAL; // 当前速度
targetSpeed : REAL; // 目标速度
acceleration : REAL := 5.0; // 加速度
END_VAR
IF currentSpeed < targetSpeed THEN
currentSpeed := currentSpeed + acceleration;
IF currentSpeed > targetSpeed THEN
currentSpeed := targetSpeed;
END_IF;
END_IF;这段代码实现了一个简单的加速过程,堆垛机根据当前速度与目标速度的比较,逐步加速到目标速度,保证运动的平稳性。
输送线控制
输送线的控制相对简单些,主要是根据传感器信号来启停输送带。
VAR
sensorSignal : BOOL; // 传感器信号
conveyorEnable : BOOL; // 输送带使能信号
END_VAR
IF sensorSignal THEN
conveyorEnable := TRUE;
ELSE
conveyorEnable := FALSE;
END_IF;当传感器检测到货物时,输送带启动,反之则停止。
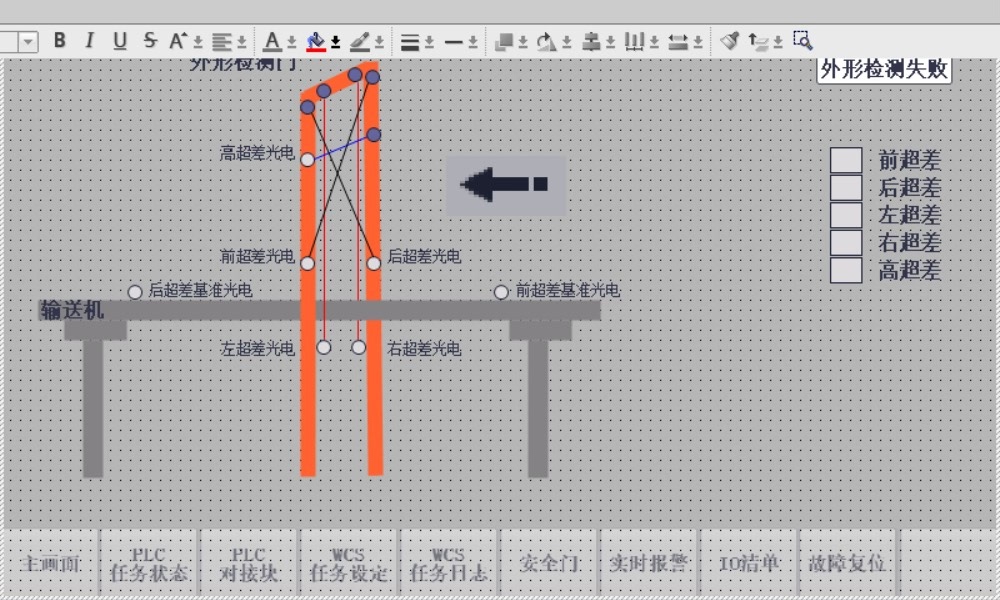
屏幕程序与电脑仿真测试
本次项目还包含屏幕程序,用于操作人员与系统的交互。而且可以进行电脑仿真测试,方便在实际部署前对程序进行验证。
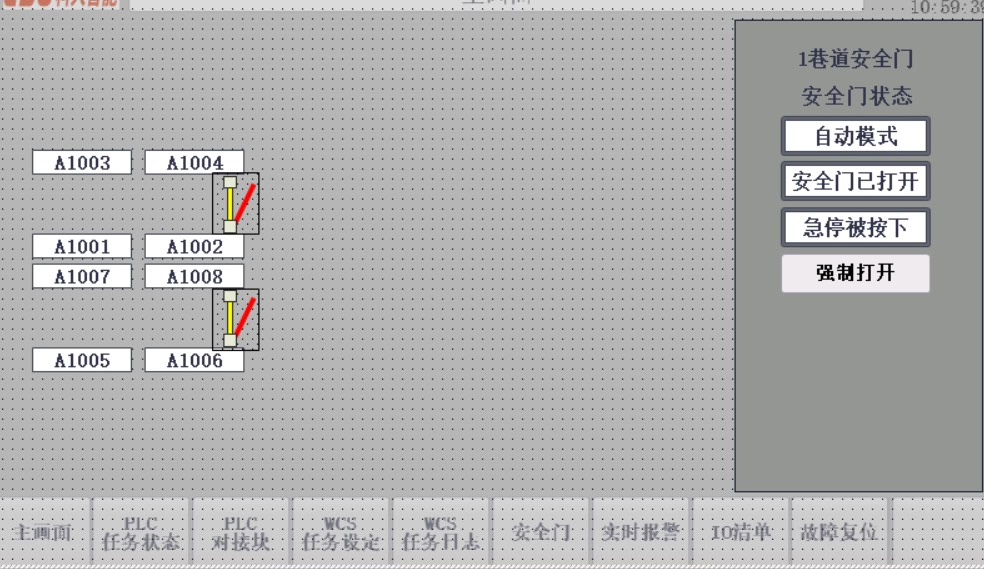
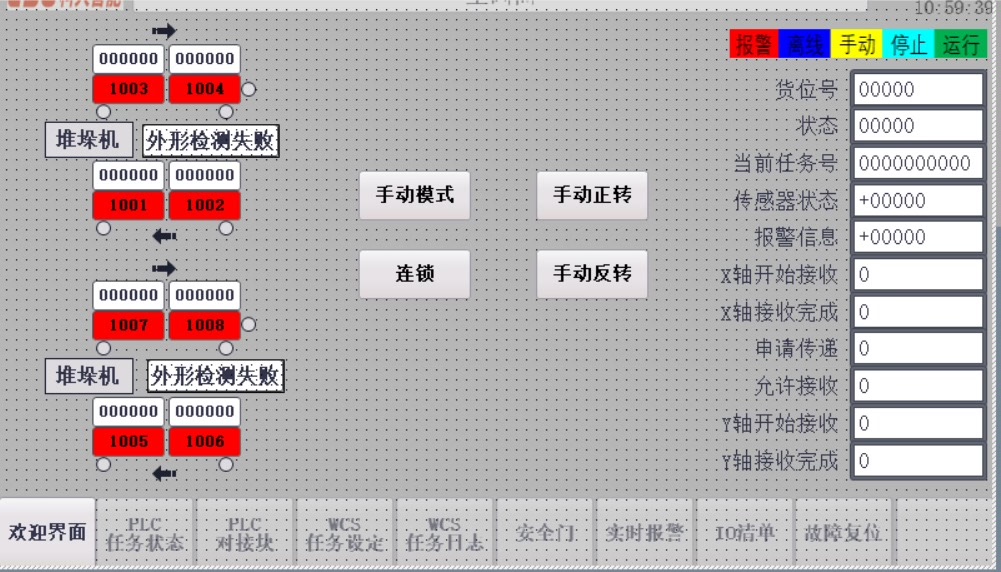
触摸屏程序开发
在博途软件中,可以使用HMI(人机界面)编辑器来开发触摸屏程序。通过拖拽各种图形元素,如按钮、指示灯、文本框等,来创建友好的操作界面。
电脑仿真测试
利用博途软件自带的仿真功能,我们可以在电脑上模拟整个立体仓库系统的运行。将编写好的PLC程序和HMI程序下载到仿真环境中,模拟各种工况,检查程序的逻辑是否正确,设备之间的协同是否正常。
整个项目包含两套PLC程序和两套触摸屏程序,涵盖了整线堆垛机的所有功能。无论是对物流仓储自动化感兴趣的爱好者,还是相关行业的从业者,这套完整的实际项目程序都具有很高的参考价值。希望大家通过对这些程序和代码的学习,能在自动化领域更上一层楼!

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐
 8
8 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)