
基于启发式算法的两级配送网络鲁棒优化模型【matlab+仿真】
随着电子商务和物流行业的迅猛发展,配送网络的效率和成本控制成为企业面临的重大挑战,尤其是“最后一公里”配送问题一直是难点。近年来,随着无人机技术的进步,卡车与无人机相结合的两级配送网络逐渐成为解决这一问题的有效方案。然而,由于配送网络的动态特性和交通环境的不确定性,构建鲁棒的优化模型和高效求解算法成为亟需解决的课题。

✅博主简介:本人擅长数据处理、建模仿真、程序设计、论文写作与指导,项目与课题经验交流。项目合作可私信或扫描文章底部二维码。
随着电子商务和物流行业的迅猛发展,配送网络的效率和成本控制成为企业面临的重大挑战,尤其是“最后一公里”配送问题一直是难点。近年来,随着无人机技术的进步,卡车与无人机相结合的两级配送网络逐渐成为解决这一问题的有效方案。然而,由于配送网络的动态特性和交通环境的不确定性,构建鲁棒的优化模型和高效求解算法成为亟需解决的课题。
本文针对这一背景,基于启发式算法构建了一个两级配送网络的鲁棒优化模型,重点研究卡车与无人机的协同路径规划问题。本文创新性地提出了以下几点:
- 提出了一种选址决策从属于路径决策的同步规划方法,将无人机起降点选择与卡车-无人机的路径规划相结合。
- 构建了带无人机旅行商问题(TSP)的鲁棒优化模型,采用二阶锥规划(SOCP)进行数学建模,并设计前沿启发式算法求解。
- 针对多台卡车与多架无人机的情况,构建了复杂环境下的鲁棒车辆路径问题(VRP)优化模型,并开发了自适应大邻域搜索算法和混合启发式算法。
二、卡车与无人机协同配送问题建模
1. 问题描述
在两级配送网络中,卡车负责将货物运输至某一地点,然后无人机从卡车上起飞,将货物配送至指定的最终客户。这一网络中的主要问题包括:
- 选址问题:无人机的起降点应该如何选择,以便最优地完成配送任务。
- 路径问题:卡车与无人机之间的任务分配及配送路径的规划。
- 鲁棒性问题:考虑交通条件和导航环境的不确定性,对配送路径进行优化。
2. 二阶锥规划模型(SOCP)
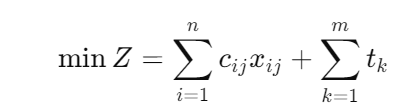
针对不确定的交通条件和导航环境,本文首次将带无人机的旅行商问题构建为一个二阶锥规划(SOCP)模型。其主要目标是最小化总配送时间,目标函数为:
为了有效解决这一复杂问题,本文设计了两种启发式算法:前沿启发式算法和自适应大邻域搜索算法。
1. 前沿启发式算法
该算法通过迭代式启发搜索和路径改进步骤,逐步逼近最优解。前沿启发式算法的主要步骤如下:
- 初始解生成:通过随机选择卡车路径和无人机起降点,生成初始解。
- 局部搜索:对卡车和无人机的路径分别进行局部调整,减少整体配送时间。
- 信息素更新:在启发式算法中引入信息素的概念,随着路径的优化,增加对优秀路径的倾向性选择。
- 路径重构:定期重新评估当前路径,根据启发信息和二阶锥约束条件进行路径重构,保证路径的鲁棒性。
2. 自适应大邻域搜索算法
为了进一步优化多台卡车与多架无人机协同配送的场景,本文提出了自适应大邻域搜索算法。该算法通过动态调整邻域范围,扩展了搜索空间,有效避免了局部最优问题。其主要步骤包括:
- 初始解生成:通过对多个卡车与无人机路径的随机生成,建立初始解。
- 大邻域搜索:在初始解的基础上,随机选择一定范围的邻域进行搜索,允许大范围路径变化,以增加搜索的多样性。
- 自适应调整:根据当前解的性能动态调整邻域大小,使搜索逐渐从全局趋向局部,提升解的精度。
四、仿真实验
1. MATLAB仿真设置
本文在MATLAB环境中对所提算法进行了仿真实验,验证其在两级配送网络中的应用效果。实验数据包括不同规模的卡车和无人机配送任务,分别模拟了单卡车-单无人机、单卡车-多无人机、多卡车-多无人机的三种情境。
仿真步骤:
- 设置配送点的坐标和需求量;
- 模拟卡车和无人机的不同路径选择;
- 考虑交通条件和导航环境的不确定性,应用二阶锥规划模型进行路径优化;
- 使用启发式算法进行求解,比较算法性能。
2. 仿真实验结果
实验结果表明,基于启发式算法的两级配送网络鲁棒优化模型在路径规划和任务分配上具有明显的优势。通过引入鲁棒性优化模型,配送网络在交通条件和导航环境不确定性下,表现出了更好的适应性和稳定性。
- 配送时间减少:相比传统算法,启发式算法能够显著减少总配送时间,特别是在不确定条件下的鲁棒优化模型中,效果尤为显著。
- 任务分配合理性提高:通过对卡车与无人机的协同优化,算法能够合理分配任务,使得无人机在“最后一公里”配送中发挥最大的效率。
- 鲁棒性增强:在仿真过程中,考虑了不同的风险惩罚系数,结果显示启发式算法在不同不确定条件下均表现出较好的鲁棒性。
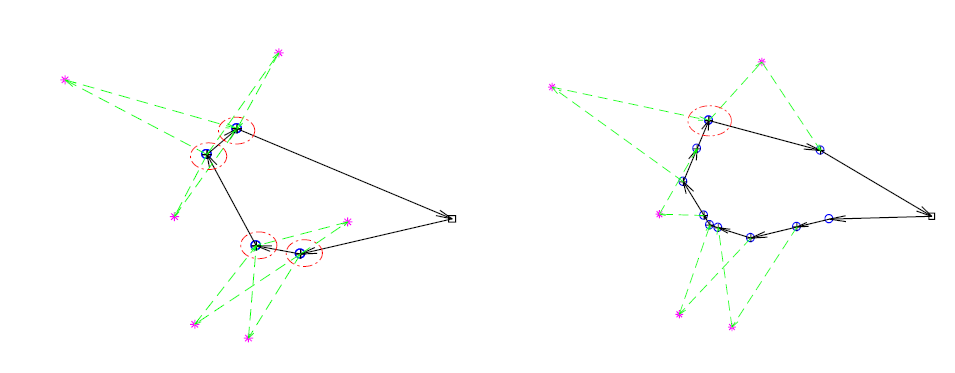
两级网络模型:
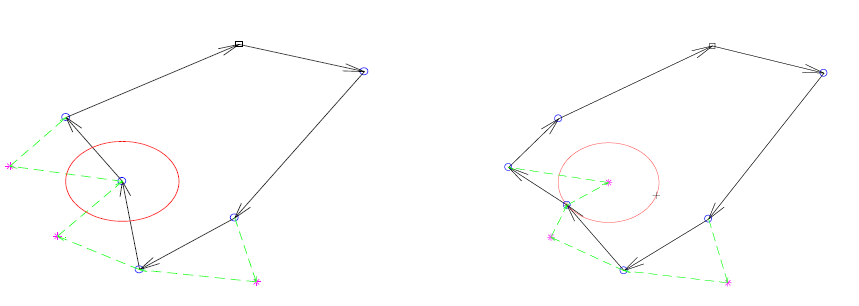
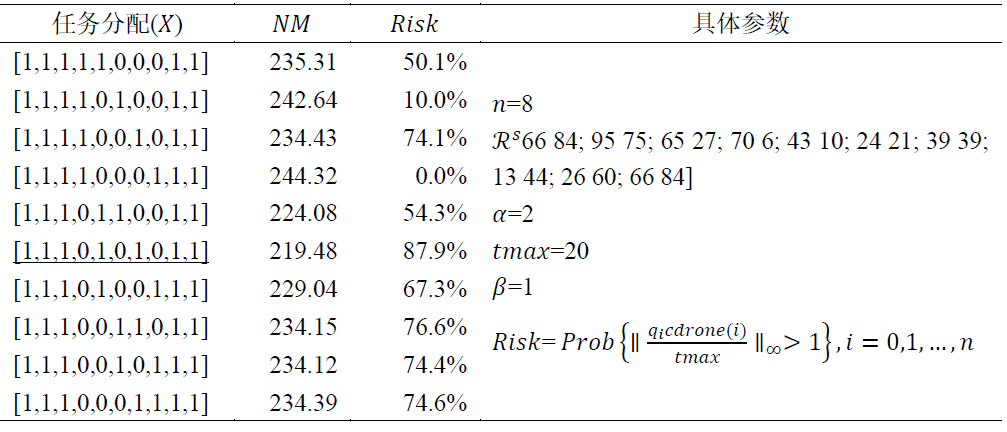
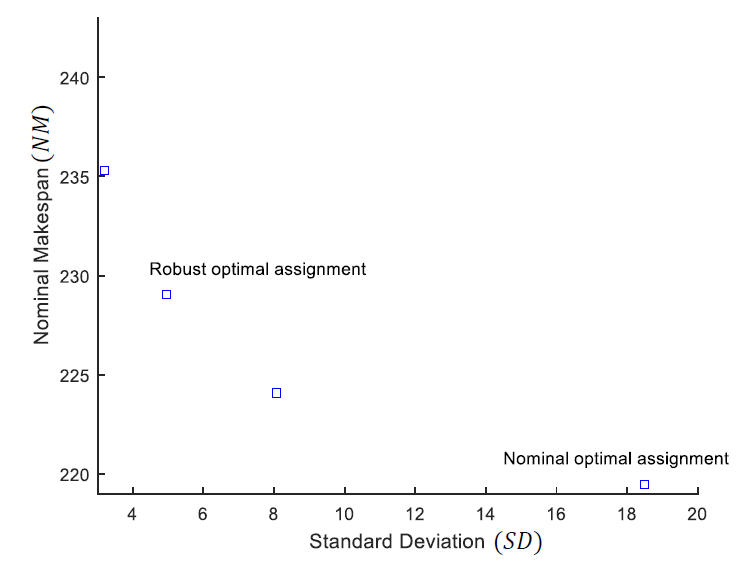
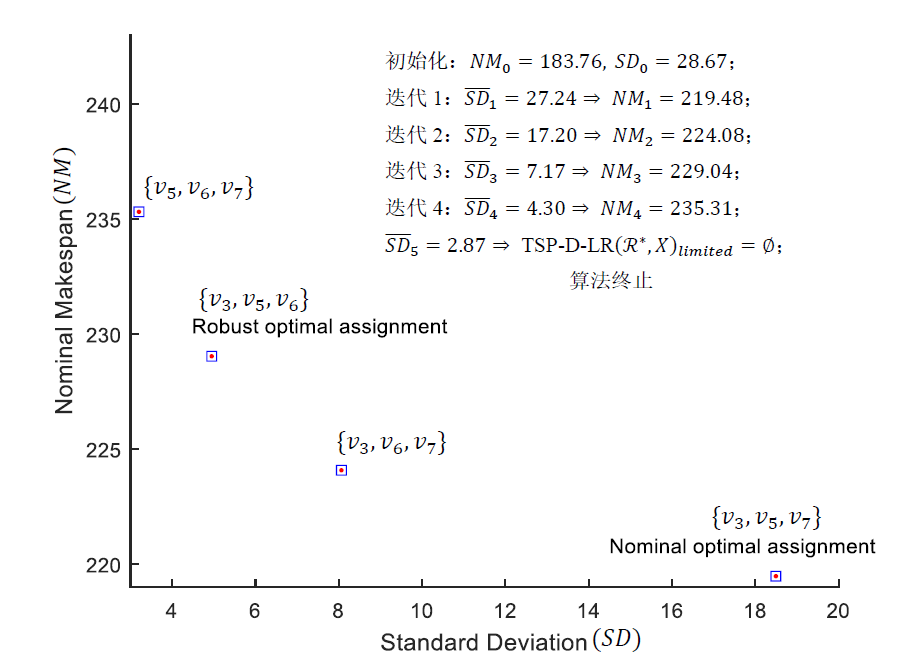
算法求解结果:

电商企业物流数字化转型必备!快递鸟 API 接口,72 小时快速完成物流系统集成。全流程实战1V1指导,营造开放的API技术生态圈。
更多推荐


 28
28 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)